Our main inquiry is investigating our reactions to biomimetic representations of fundamental human behaviors. The audience would see a pair of performers on opposite sides of the table with one “feeding” the robot with a wide assortment of food while the other operates the actual robotic head. One aspect we wanted to emphasize is the emotive quality of the head itself. While the form already lends itself to the musculature and mechanics of how the human body chews, we also wanted it to be able to express natural, intuitive reactions to the food it is eating. Our neck musculature and actuators thus had the constraint of both looking anatomic but also being able to replicate a similar range of motion as a real human neck.
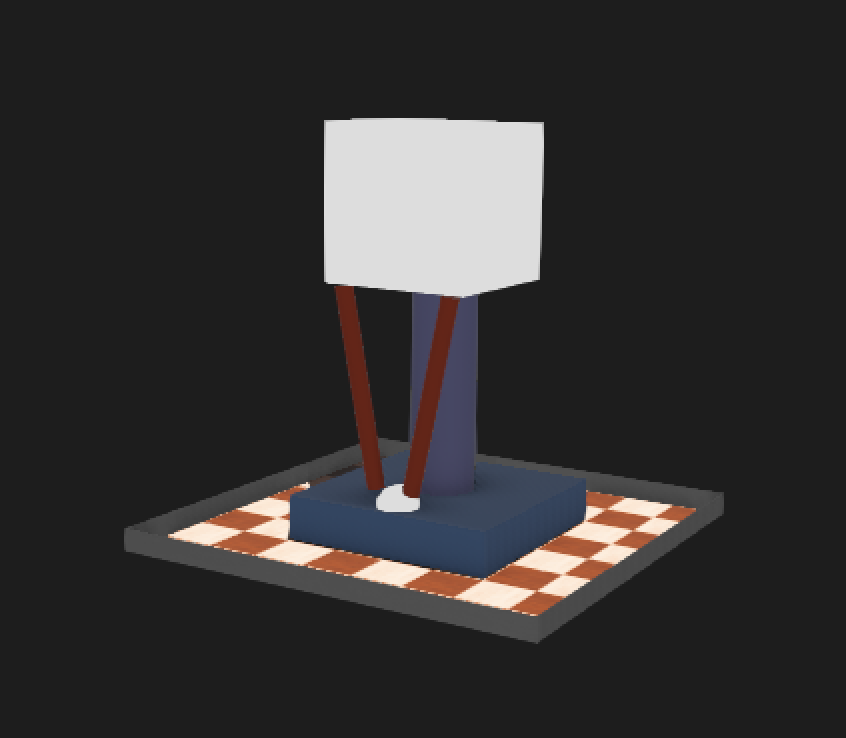
Because of this, our main experiments this weekend focused on seeing how we could replicate this mechanic in our model. Our initial concept revolved around balancing the head over four linear actuators that could independently be fired to adjust tilt, lean, and roll, but the mechanism seemed too complicated and wouldn’t be able to support the weight of the head. We looked at other literature and compliant mechanisms to add rotation or tilt to the neck joint, but ultimately settled on a system where the base of the skull rests on a ball joint with two pairs of linear actuators connect from the outside of the inner mandible to the front base of the neck. This way, we could still retain all three rotational degrees of freedom but have most of the weight supported by the spine of the robot.
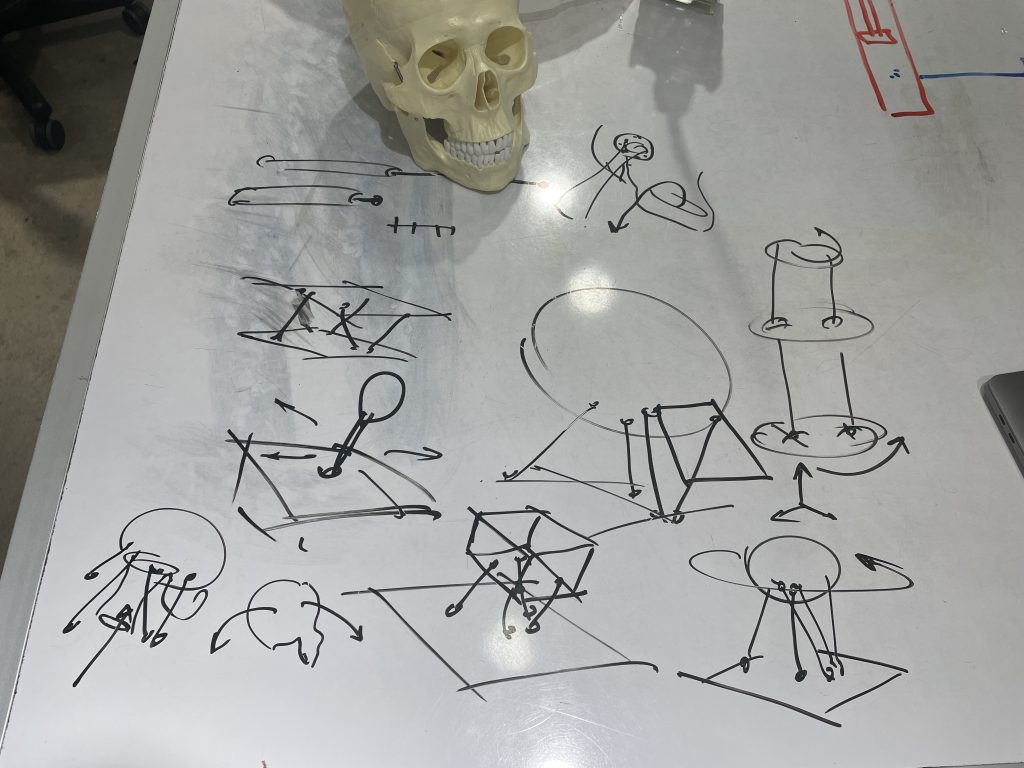
We then tried to model this in Webots using a pair of SliderJoints with linear motors connected to a skull on top of a neck that had ball joints between each of the connections. However, we could not get the SolidReference to close the chain to create stiff motion, with the neck actuators flailing about. Not sure where in the tree to put the reference solid, but tried several configurations with no luck. File is provided below for more refinement. We felt being able to control these actuators could provide valuable feedback in the angle and range of motion for our expressions if we chose to later map the controls onto a separate interface such as a joystick or pad.