Chewing Robot
Janice Lee, Richard Zhou
https://drive.google.com/file/d/1zxKbpeQ8urv4j4JKt3BOQpGrqWthjGm9/view?usp=sharing
I. Project Objective
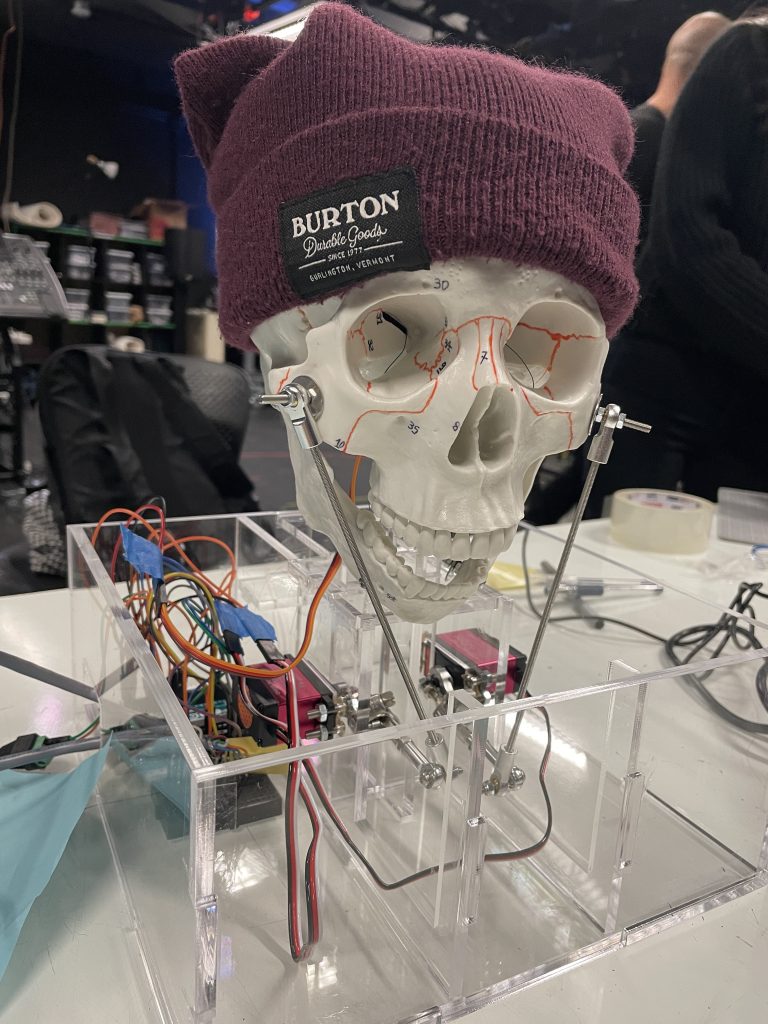
Our project focused on the ethical questions surrounding biomimicry and the moral ambiguity of accurately giving animate qualities to objects that lack life. In our chewing robot, the viewer is confronted by the juxtaposition of a familiar sight of a person feeding another like a mother would to a child but instead of a human form, is built from anatomical parts and mechanical linkages. We wanted to heighten the sense of unease in the contradictions between what movements were expressed with their lack of fundamental purpose to the robot’s own needs.
II. Reflection
Throughout the semester, there were lots of themes covered in class such as the use of autonomous behavior as a narrative medium, the relation between human and machine in hybrid performance, and the animate possibilities of simple machines.
Regarding the autonomous behavior of our chewing robot, our robot was controlled using two joysticks connected to an Arduino controller. One of the joysticks controlled the neck movement while the other determined the opening and closing of the jaw. Since the robot is controlled by a human operator, the performance of the robot was not entirely autonomous. However, by being able to control directly, the robot was able to make a variation in the movement and react differently in occurring situations.
The performance of the robot was conducted with a human performer feeding the robot by offering chips, pretzels and crackers. During the performance, the human performer would offer the robot snacks, and the robot would respond by either nodding or shaking its head. The robot is questioned and it responds with motion. Both the human performer and the robot are essential to the performance and the relationship is well established where the human performer cares for the robot and the robot depends on the performer.
Lastly, for the animate possibilities, we believe that our chewing robot is full of potential. Although our performance was mainly on imitating the chewing motion of humans, the robot is fully capable of imitating neck and jaw movements. Thus, with a variation in the combination of these movements, the robot will be able to capture other bio-inspired movements for artistic performances.
Overall, the main goal of the project was to mimic the movement of humans chewing food, and with the robot, we were able to mimic the movements.
III. Outcomes
Much of our initial conflict originated in deciding how to actuate the head to balance expressiveness with ease of control. Our initial concepts maximized the anatomical correctness of having four symmetrical linear actuations giving full control of all rotational axes with some secondary translational movement. However, the complexity of fabrication and control ultimately led to us taking a similar approach with two linear actuators in the front with a single, centered guide rod along the back. This way, we retained both tilt degrees of freedom and kept the sleek, neck-like visual lines across the front while only needing two motors to control.
We found the actual chewing motion much easier to deal with than the neck. We decided to mount the motors inside the cranial capacity itself so that the movement of the mandible was entirely independent from the orientation of the skull. We also made sure the closing of the mouth was powered rather than opening, so we could control the torque of how hard we wanted to close the jaw. While this was great in theory, we found during our performance that our motor did not have sufficient torque to truly crush the food inside the mouth, and relied more on the stronger, higher-torque motors in the neck to tear food rather than a simple biting motion. In future versions of the robot, we would benefit from upgrading the motor to support both options.
We found the actual performance aspect crucial to how the skull read to the viewers. We phrased each interaction as if we were interacting with a small child, giving yes-no questions that were easy for the controller to respond to in a natural, conversational manner. The back and forth helped set the context and give intuitive yet convincing ways of freestyling the performance.
IV. Citations
Initially, during the development and design step of the project, we were motivated to imitate the biological chewing process of the human jaw. So, in order to study the anatomy of the jaw motion, we referred to the following youtube video:
Jaw open & close muscles (Mandible Elevation & Depression Muscles)
To develop this robot, we refer to external works of robots with similar functionality. Specifically for the neck movement of the robot, we referred to the mechanism of the Mesmer 2.0 robot.
Mesmer 2.0: Interaction & Quick Release Head
Also, to check other pre-existing chewing robots, we studied the mechanism of a chewing robot developed by the Korean Food Institute.
New ‘chewing robot’ helps develop softer food for the elderly
V. Technical Documentation
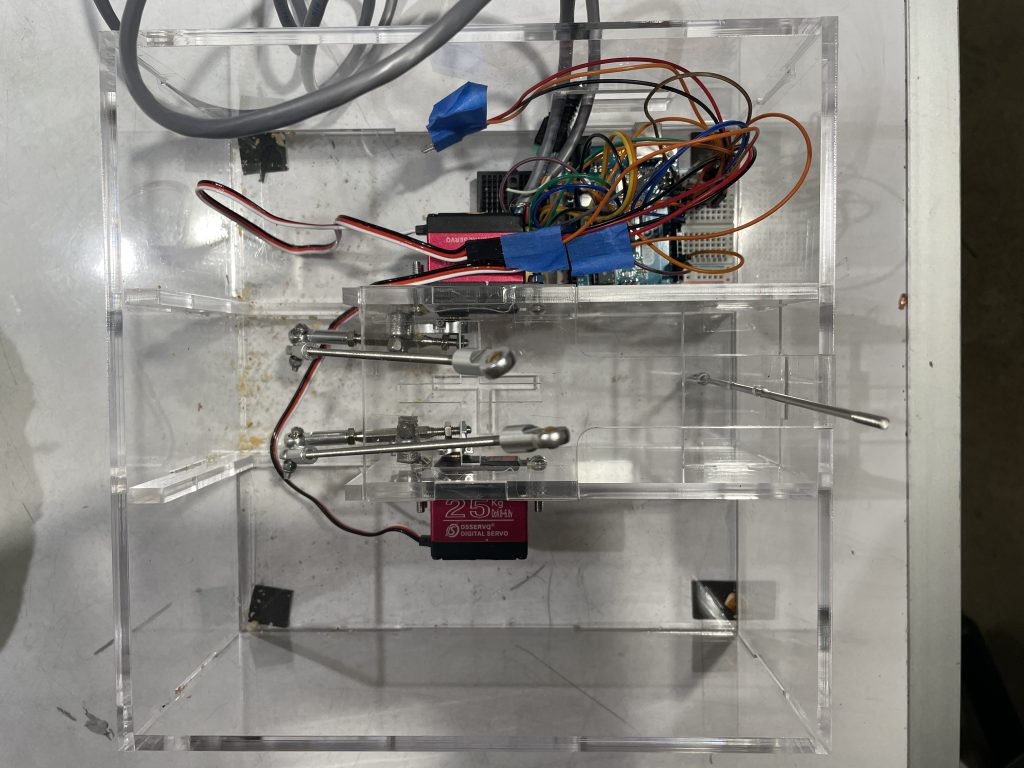
For the technical component of this project, our team wrote code using Arduino to run three servos motors, two for the neck movement and one for opening and closing the jaw. The code will be provided in Section 1 Program Source Code. Also, to improve the stability and the position of the skull, our robot has a sturdy base, which was specifically designed using a 3D model. The mechanical CAD file will also be attached in section 2. Lastly, some of the linkages and connections between the different components will be covered in section 3.
1. Program Source Code
The code revolves around driving three motors with two joysticks. The primary joystick drives the motions of the neck while the secondary joystick drives the chewing motion of the jaw. We read both axes of the primary joystick, with the vertical axis corresponding to the overall average tilt of both actuators, causing the head to tilt up and down. The horizontal axis corresponds to the difference in the two neck actuators, causing the head to tilt to the left and right. Each motor output is locked to the range of motion of the structure to prevent the operator from unintentionally destroying the frame. In addition, pressing the joystick all the way down resets the neck to the default position, which was often used when the head got in a strange position that was difficult to bring out of. The jaw joystick was much simpler, closing or opening the jaw depending on where the joystick was oriented. It was similar locked to the range of the jaw itself to prevent it from unnecessarily applying torque to our closing mechanism.
2. Mechanical CAD Files
The base component that holds up the skull was made by laser-cutting quarter inch clear acrylic. All the 3D Modeling were done using Solidworks 3D Modeling Software, and the assembly of the base is the following:

The original files for the CAD files are saved as ‘skull_model_base.zip.’ The same folder also includes .dxf files for the final laser-cut parts.
3. Photographs of Specific Elements



VI. Individual Contributions
| Task | Janice | Richard |
|---|---|---|
| Design | – 3D Modeled draft_design_1 – Redesigned draft design 2 to improve the sturdiness – 3D Modeled draft_design_2 | – Designed and drafted initial design structure and dimensions (draft_design_1) – Created board for overall visual direction of robot – Designed linkage system for neck actuation and chewing mechanism |
| Mechanical Structure | – Laser-cut both draft designs – Assembled/Attached the laser-cut parts | – Assembled servo motors to the base and skull – Assembled the linkages and mounts for neck movement |
| Electrical | – Initial breadboarding for the servo motors with power supply – Adjusted the joystick wiring for longer wire | – Finalized wiring for joystick and three neck motors for size and ease of control – Debugged the servo motor power supply issue |
| Programming | – Initial Arduino sketch for controlling servo motors using a joystick | – Revised the Arduino code to adjust for additional neck + jaw motors and two joystick inputs – Revised Arduino code to improve ease of control of neck movement |