Exercise: Suitcase Sim¶
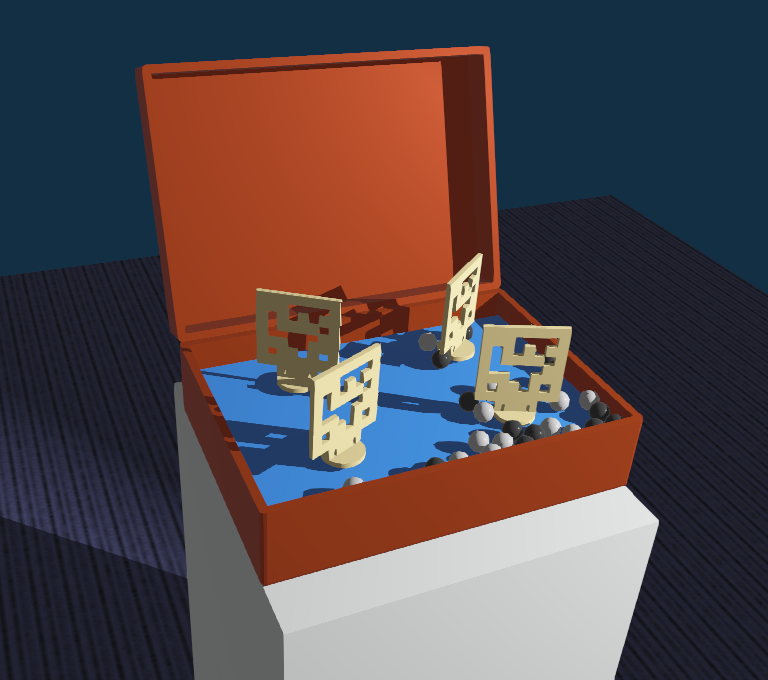
Screenshot of Webots model of actuated suitcase.¶
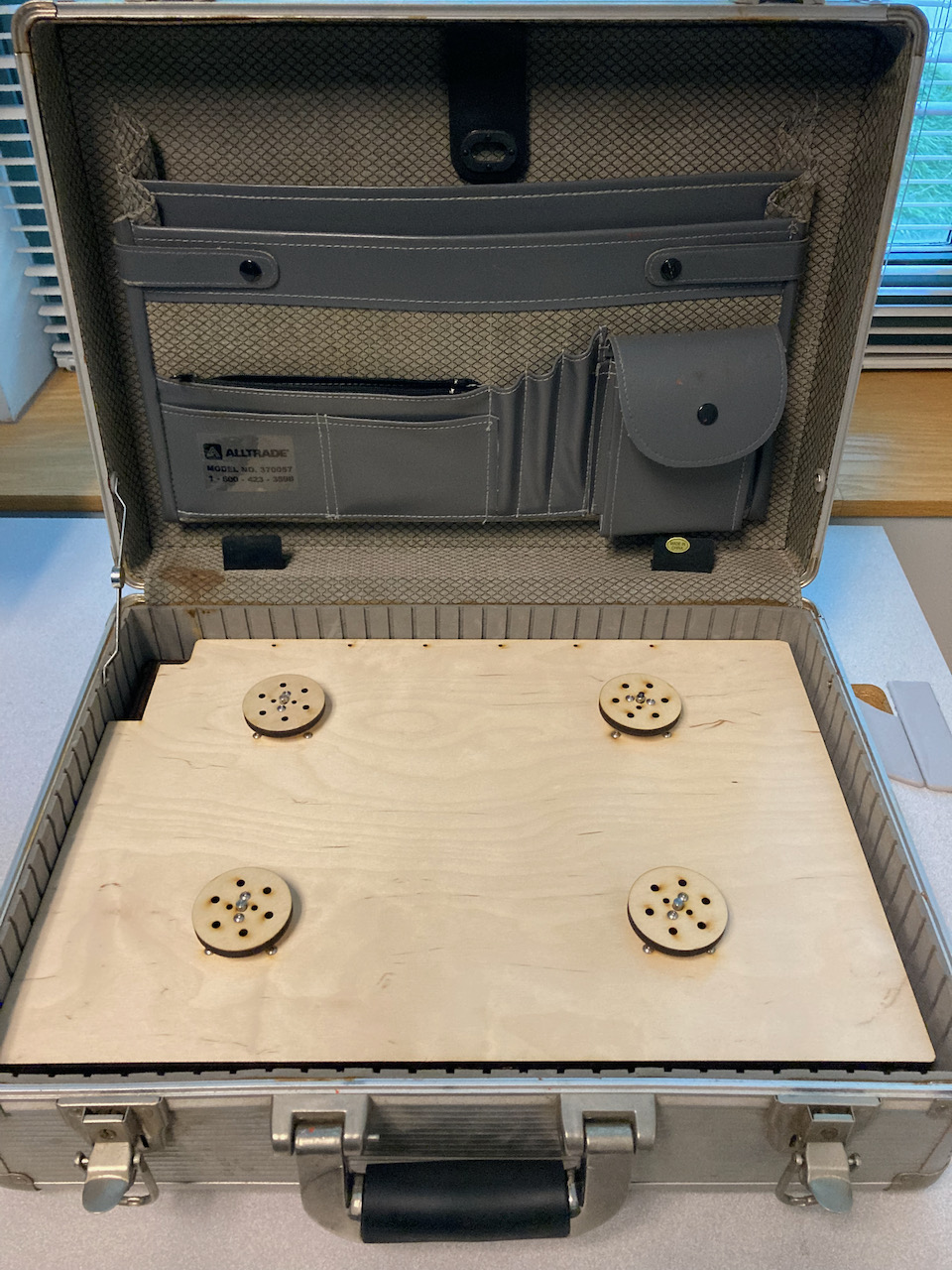
The physical suitcase testbed. The four interface discs are mounted on stepper motors. The power supply and Arduino CNC stepper driver are mounted below the deck.¶
For this exercise, students will develop a performance which takes place within a suitcase. This first part includes developing the concept and testing in simulation. The performance script will then be tested on the physical suitcase hardware. This shared platform provides four stepper motors mounted within an aluminum equipment case. The installation also provides two controllable light fixtures.
The chief objective is to explore the constraints and opportunities of physical sculpture within the context of long-term theatrical performance. A secondary objective is to identify details of the common platform we can share for implementing multiple performances.
As starting points, you might consider some of the possible goals:
using dynamic interaction with moving objects to convey a sense of purpose
embracing randomness and chance movement as an expression of meaning
utilizing rhythmic or patterned movement to convey tempo and mood
creating expressive movements with a sense of individual identity
stimulating human empathy using movement
portraying a locus of attention via gesture and pose
illustrating a process of turn-taking
implying a dialogue or expressing a relationship
Objectives¶
After this exercise, you should be able to:
Formulate a creative inquiry as a robotic performance concept.
Resolve a performance concept into a kinetic sculpture system within formal constraints.
Resources¶
Webots simulation model: Suitcase Robot Model, included in Webots.zip as suitcase-demo.wbt.
Testbed physical design: Suitcase Testbed
Deliverables¶
A Google Doc with a brief paragraph describing your choreographic intent and outcome, submitted as per Documentation Procedure. This may be private if you prefer.
Your Python controller script, submitted as a properly-formatted block within the document.
Short video clip (less than 60 seconds) of robot performance, uploaded to the Google Shared Drive and included as a link within the document.
Zip file of your Webots project uploaded to the Google Shared Drive and linked into the document. Please note the relevant world and controller file names in your doc. Please preserve the folder structure (e.g. worlds/, protos/, controllers/) so it could be unpacked and used. If possible, please give distinctive names to your modified worlds, controllers, and protos (or delete the extraneous ones).