Ideas for Asymmetrical Secondary Creature:
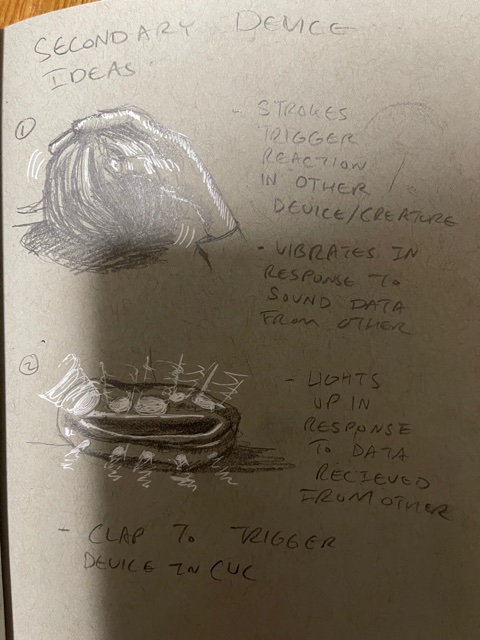
- Furry ball that triggers reaction in main creature when stroked. This creature will vibrate in response to the noise data received from the creature in the CUC.
- This creature lights up in response to the noise data received from the creature in the CUC. This creature will send sound data to the creature in the CUC to trigger its reaction.
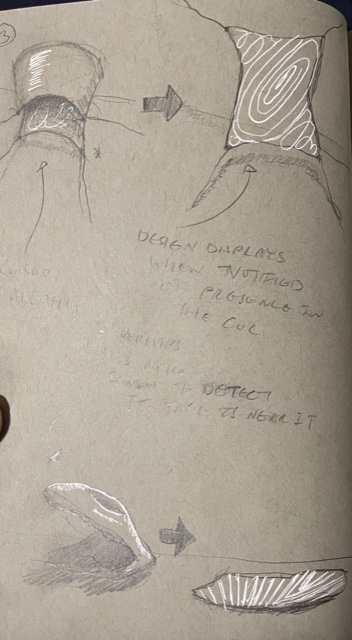
- This creature opens to reveal a cool pattern when it receives sound data from the creature in the CUC. It has a motion sensor that detects when Yael is near it to trigger the reaction of the CUC creature.
We also did some more experimenting with different ways to reinforce the pleats as well as different sized pleats. This proved much better than the previous iteration as the pleats easily opened and closed and held their shape.
Additionally, we began experimenting with the code to make it behave differently with different volumes of sound.
# Write your code here :-)
# SPDX-FileCopyrightText: 2021 ladyada for Adafruit Industries
# SPDX-License-Identifier: MIT
# """
#This example prints out sound levels using the sound sensor on a Circuit Playground Bluefruit.
#Try making sounds towards the board to see the values change.
#NOTE: This example does NOT support Circuit Playground Express.
# SPDX-FileCopyrightText: 2021 ladyada for Adafruit Industries
# SPDX-License-Identifier: MIT
#"""
#This example lights up the NeoPixels on a Circuit Playground Bluefruit in response to a loud sound.
#Try snapping or clapping near the board to trigger the LEDs.
#NOTE: This example does NOT support Circuit Playground Express.
import time
from adafruit_circuitplayground import cp
# Import the low-level hardware libraries.
import board
import pwmio
import digitalio
import analogio
import pulseio
# Import the Adafruit helper library.
from adafruit_motor import servo
# Initialize hardware.
# Create a PWMOut object on pad SDA A5 to generate control signals.
pwm = pulseio.PWMOut(board.A5, frequency=50)
# Create a Servo object which controls a hobby servo using the PWMOut.
actuator = servo.Servo(pwm, min_pulse=1000, max_pulse=2000)
# When there is a loud sound put the servo motor in a position where it sucks air out of the pneumatic.
actuator.angle = 10
while True:
if cp.loud_sound(sound_threshold = 300):
print("something")
actuator.angle = 180
time.sleep(3)
elif cp.loud_sound(sound_threshold = 150):
print("no way it worked!")
actuator.angle = 60
time.sleep(3)
else:
actuator.angle = 10
Leave a Reply
You must be logged in to post a comment.