Team Management
Kevin: Generating Rhino/Grasshopper toolpathing
Elton: Developing mounting systems for foam, Robotic arm attachments
Testing paint and medium printing on foam
Andy: Writing Python code for pattern generation from provided image
Bi Weekly Goals
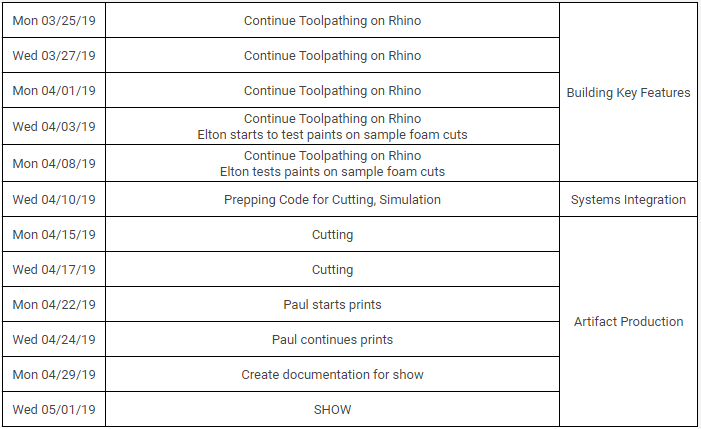
Kevin is working on the tool paths in Rhino and once he is done, we will try to apply the same algorithms to the final image Paul wants us to carve. Then we will runs simulations to ensure no collisions and then hopefully carve on a full sheet.
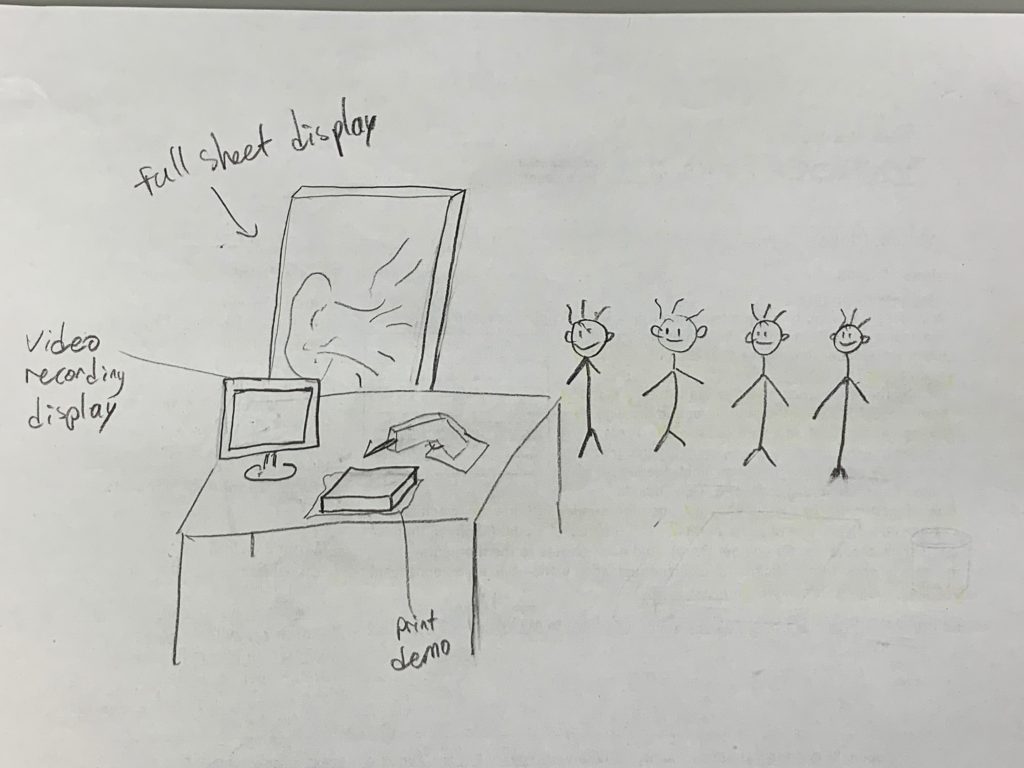
Final Show Vision
For the live presentation we want to display the full size carvings/prints and also have a small scale demo, maybe with a 1’x1′ print block. We’d like to have a multi-block color print or something beyond just outlines for the smaller print. We will have videos playing of the robot carving at the foam since we won’t have the actual robot, and display the hot knife setup that Paul and the robot used.