Revised Synopsis
The project idea is a swimming robotic jellyfish, that would be propelled by the motion of its body and legs contracting. The jellyfish would be mostly constructed of soft silicon materials, with either pneumatic or hydraulic actuators installed to create motion. If a pneumatic system is used, the components of the pneumatic system could be installed outside the tank and have air tubes running into the jellyfish robot in the tank to reduce size/weight. The artistic motivation is to mimic a creature found in nature, but also to choreograph a series of movements for the robot that a natural animal would not perform.
Creative Requirements
Satisfying creative goals may require more interrogation of the essential idea. At this point, more specificity will help focus the process. So please think carefully about the following prompts, considering that not all will apply to your specific idea:
• What are the essential movements?
The essential movement is for the jellyfish to be able to swim up and down. This would be the MVP. Other movements include spinning, turning (left or right while still swimming in the upward direction), and flips.
• What is the tempo, pace, or speed for each movement?
For swimming up and down, the speed would be slow, matching the speed of a natural jellyfish. Turning would also be a slow movement. For spinning, I imagine the jellyfish to spin relatively quickly, for example making 5 rotations a second. For the flip, the movement would be medium speed, with the duration of the flip lasting a couple of seconds.
• How many control channels are needed?
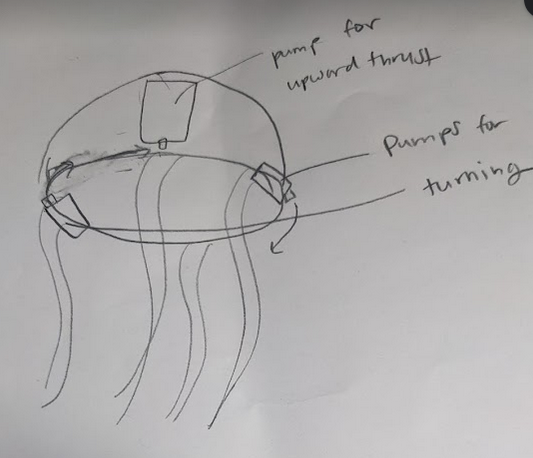
I believe at least 3 control channels are needed. 1 control channel is needed to open and close the tentacles to create upward thrust. 2 control channels which could be propellers or pumps placed radially would be used for turning and spinning maneuvers. I’m not sure how to technically make the jellyfish flip or where to place actuators to make that happen.
• What is the overall size or scale?
The size would be pretty small for the actual jellyfish, although we probably need a large enough tank for it to have space to do its movements. The jellyfish will be around the size of 1-2 hands.
• What is visual design language?
The visual design language would be to mimic the form and color/texture of a real jellyfish. Jellyfish have a translucent, soft, alien like quality, and are associated with the idea of glowing.
• What specific materials, colors, or textures are essential to convey the idea?
I believe the silicone used for the jellyfish should be a translucent white color. The convey the idea of glowing, we could have the tank lit with LEDs that would project onto the surface of the jellyfish.
You may find in the course of your thinking that you wish to revise your project premise. This is perfectly fine, but please pause and write a new carefully revised project statement. In your write up, please identify the specific insight which led to the revision.
Technical Critical Path
The critical path is the longest chain of essential milestones in a project plan, representing the rate-limiting sequence of goals. In a research project, the plan is always contingent since unknown problems or discoveries may trigger a significant pivot. Please note the constrast to a development project which seeks an efficient path using well-understood processes to achieve a goal reliably.
So please think carefully about the following prompts, considering that not all will apply to your specific idea:
• What is the simplest version of the system which can address the creative goals?
The simplest version of the system is a simple hand-pump actuated jellyfish like the one built in this video:
https://courses.ideate.cmu.edu/16-480/s2022/ref/text/video/misc.html#jono-sanders
This could address the goals of making a simple jellyfish to mimic the real creature. However, it is very simple in terms of control, so ideally we could add actuators to it and make it freely swimming.
• What are all the components of the overall system? E.g. this may include elements of structure, actuation, power, sensing, computation, algorithm.
Structure: silicone molded body
Actuation: Needs to be able to generate thrust and spin.
Sensing: an accelerometer or IMU could be used for closed loop feedback controls. Also, a touch sensor could allow the jellyfish to change directions when it hits a wall
Computation: generate the actuator control to create desired movement.
• Are there rigid or mechanical parts in addition to soft materials?
Yes, we will need to use pumps.
• Which specific components will be hardest to fabricate? What specific techniques might be included?
I think getting the silicone body to mold correctly will be the hardest to fabricate. Some specific techniques including 3d printing the mold, pouring in the correct ratios of silicone mix and degassing.
• Which specific components will be hardest to design? What specific design methodology will be needed?
The hardest components to design will be the actuators that make the jellyfish spin or do more complex movement. I can look into how this is done for underwater vehicles such as submarines.
Proof-of-concept
With that in mind, please choose the most productive first step toward realizing the system, and describe the first proof-of-concept experiment you could run.
• What is the goal?
The goal of the initial test is to figure out the casting process and make some simple initial movements. I would build a jellyfish similar to Jono Sander’s video that is powered by a simple hand pump.
• What materials or processes are required?
Silicon, 3d mold, casting materials, tubing, hand pump.
• What kind of scaffolding is require to test the result?
The hand pump is the scaffolding, since in the final version, we’d like to use actuators.
References:
https://www.youtube.com/watch?time_continue=10&v=POfT02BIPpY&feature=emb_logo
https://www.youtube.com/watch?v=NxcHxG9LVCQ
https://www.youtube.com/watch?v=ytKzx2Xsukk
Jeongae Bak et al., “Hovering Control of an Underwater Robot with Tilting Thrusters Using the Decomposition and Compensation Method Based on a Redundant Actuation Model,” Robotics and Autonomous Systems 150 (April 1, 2022): 103995, https://doi.org/10.1016/j.robot.2021.103995.
Tao Du et al., “Underwater Soft Robot Modeling and Control With Differentiable Simulation,” IEEE Robotics and Automation Letters 6, no. 3 (July 2021): 4994–5001, https://doi.org/10.1109/LRA.2021.3070305.
Jennifer Frame, Nick Lopez, Oscar Curet, and Erik D. Engeberg. Thrust force characterization of free-swimming soft robotic jellyfish. Bioinspiration and Biomimetics, 2018. doi:10.1088/1748-3190/aadcb3