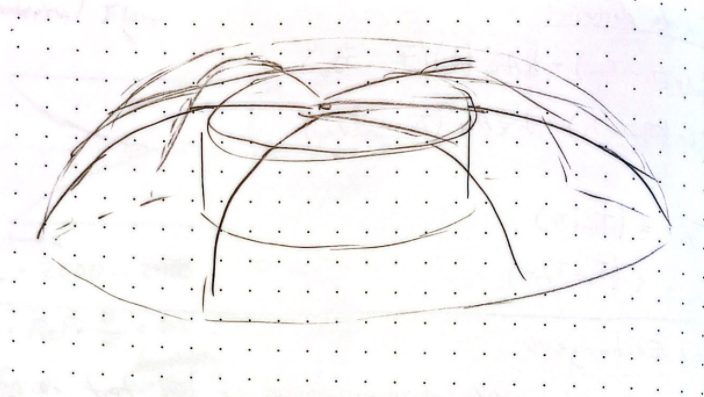
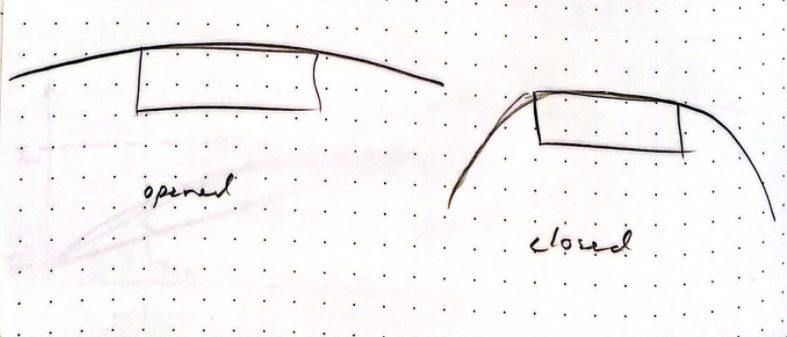
My project goal is to create an aquatic “ecosystem” with simple soft creatures which interact with each other in some passive way. Since multiple soft robots will need to be fabricated, the actuation methods for the individual robot will be simplified. Inspiration is taken from aquatic invertebrates in nature whose main resource for propulsion is ocean currents. The soft robot will be immersed in an aquarium with a fixed current, and by opening and closing a soft radial flap can catch the current for propulsion. With multiple robots in the tank, slight drifting will cause them to interact with each other, either through repulsive magnets or some other passive means.

Creative Requirements
- Multiple soft creatures in the aquarium (3-5)
- Some level of controllable motion
- Interaction between the soft robots within the environment
Critical Path
- Desired behavior chosen
- General form determined
- Actuation method determined
- Actuator, power, logic housing
- design in CAD
- 3D print of housing
- Mold fabrication and soft component fabrication
- Assembly
- Structural acceptance test
- Programming
- Tank construction
- Motion acceptance test
Proof of Concept
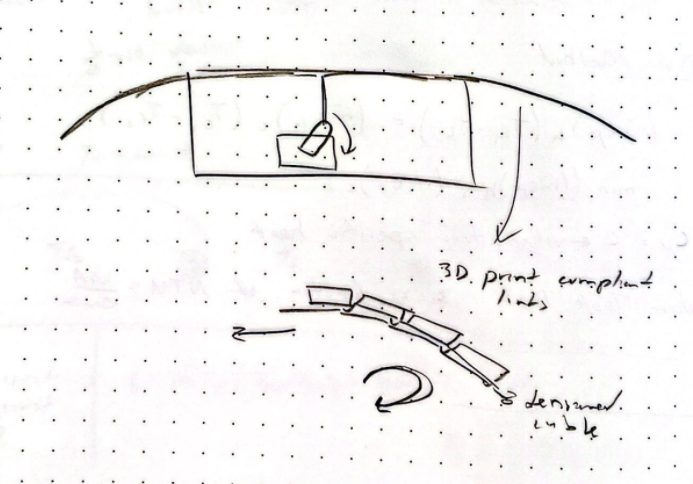
The first proof of a concept would be an unintegrated system that can produce the desired actuation which would allow the robot to catch the current in the tank. This would require a molded silicone part from a 3D printed mold, servo or other actuator with basic logic, and the basic mechanical mechanism for translating the servo motion to the radial open/close motion desired. With a working proof of concept, work can then be done on integration, packaging, waterproofing, and programming.
Resources
L. Hines, K. Petersen, G. Z. Lum, and M. Sitti, “Soft Actuators for Small-Scale Robotics,” Advanced Materials, vol. 29, no. 13, p. 1603483, 2017, doi: 10.1002/adma.201603483.