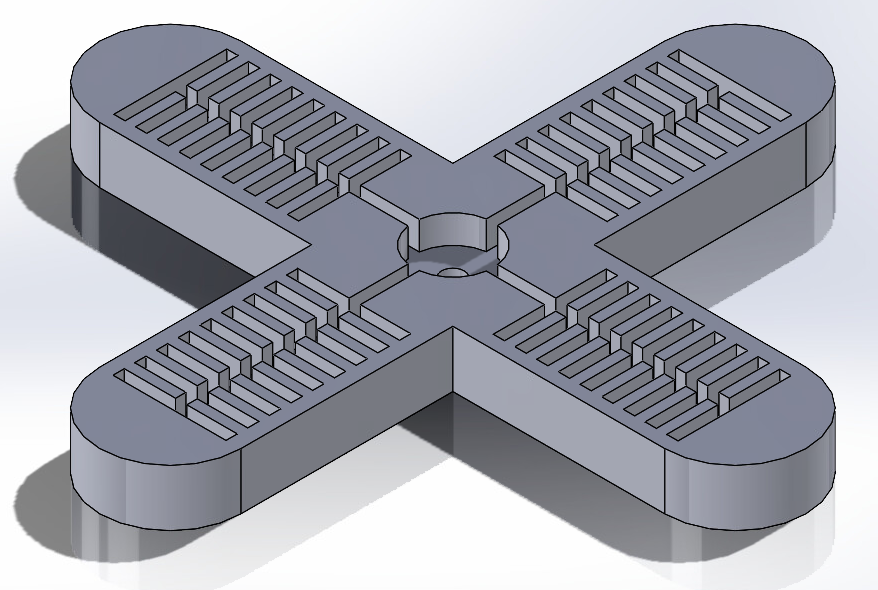
Based on a gripper design from various sources, this actuator translates pneumatic pressure to a gripping force. Utilizing two different thicknesses of silicon on the top and bottom of the actuator, it is able to bend its “fingers” inwards.
The link to the files is here: https://drive.google.com/file/d/1d0tVN18X5IG1vFOcGbd8nepZ__HgYM8n/view?usp=share_link