Elise Chapman and Leah Walko
Project Proposal
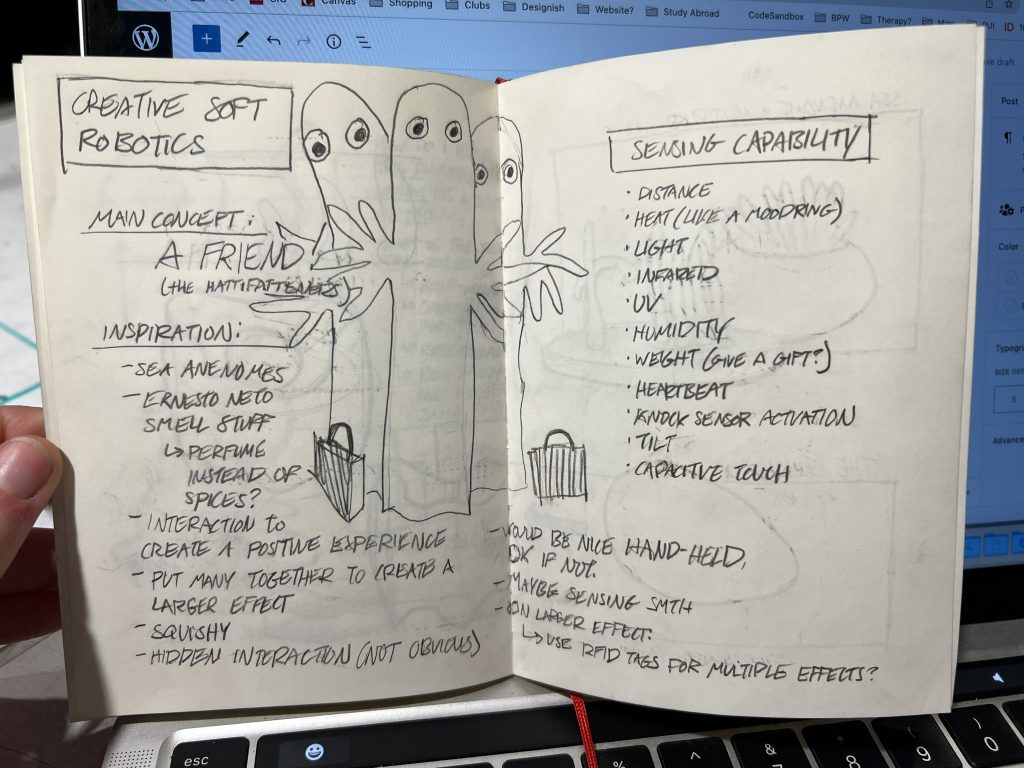
A sea anemone style of creature, responsive to human touch.
Sketches + Rough Prototypes
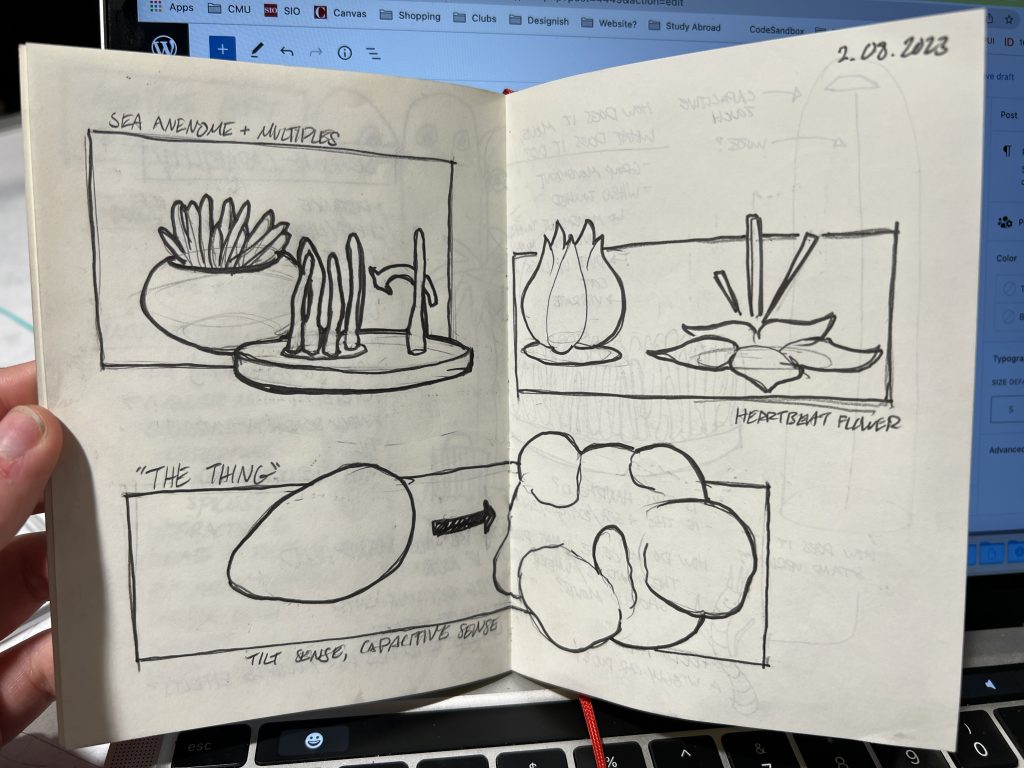
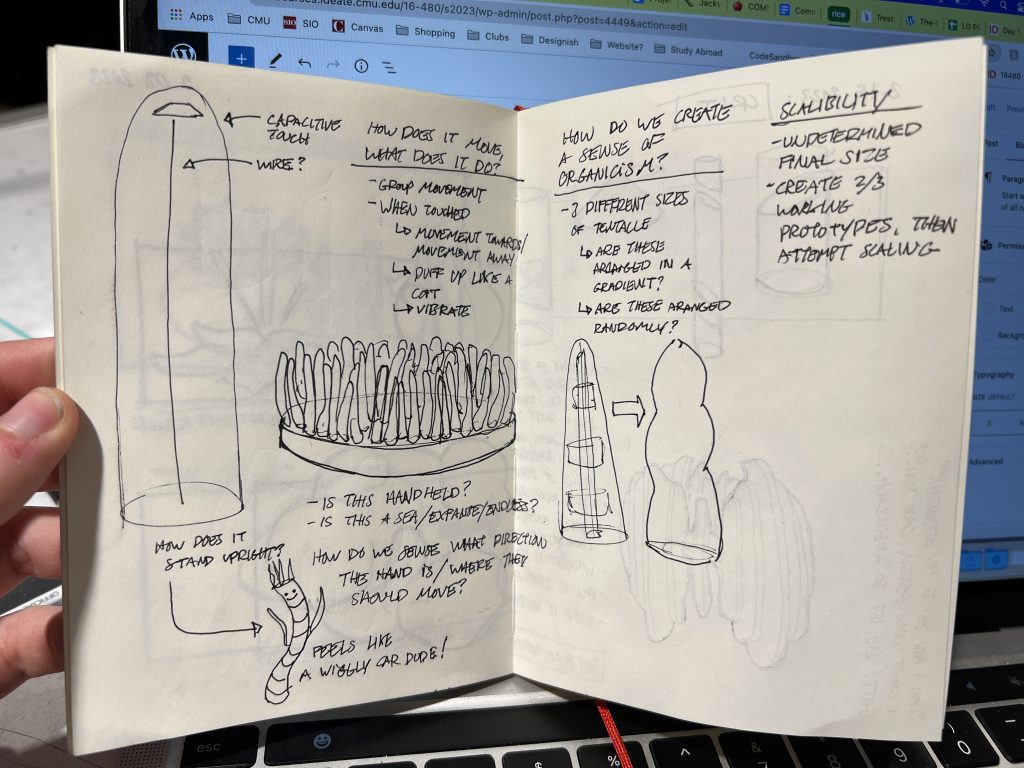
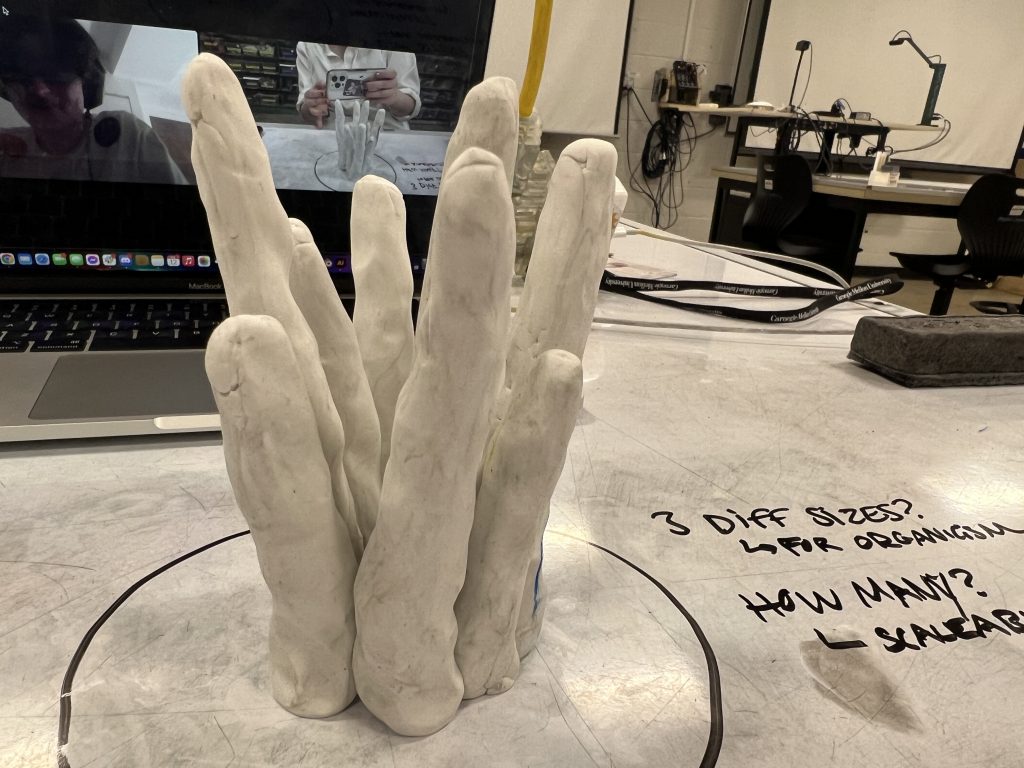
Sense of Movement
If possible, we would like to actuate the celiaci to move towards the user’s touch/hand, but we understand that that is difficult and potentially out of scope. Otherwise, we plan to inflate the celiaci and make them vibrate in response to the touch/hand.
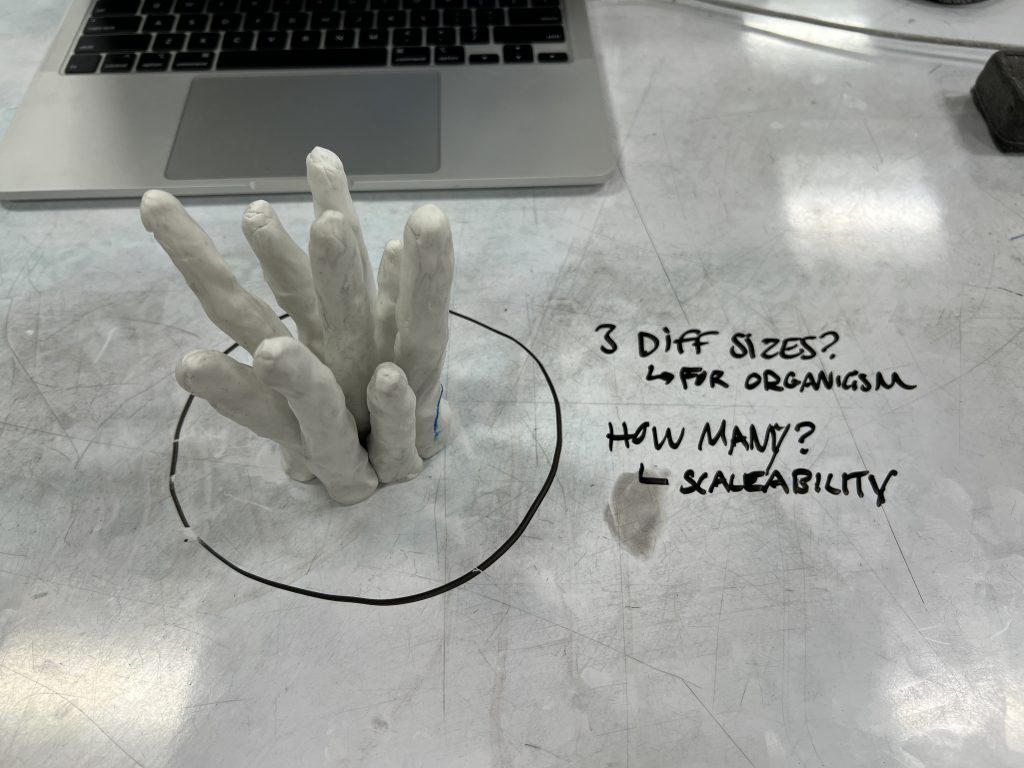
Scalability Plans
We intend to make a single working piece, then produce two or three other working prototypes to check group reaction. From there, we will produce as many more as we can.
First Experiment Plans
Work on creating a mold with several chambers to facilitate multi-directional movement.
Related papers:
K. Suzumori, S. Iikura and H. Tanaka, “Development of flexible microactuator and its applications to robotic mechanisms,” Proceedings. 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 1991, pp. 1622-1627 vol.2, doi: 10.1109/ROBOT.1991.131850.
T. Wang, Y. Zhang, Z. Zhu and S. Zhu, “An Electrohydraulic Control Device With Decoupling Effect for Three-Chamber Soft Actuators,” in IEEE/ASME Transactions on Mechatronics, vol. 27, no. 3, pp. 1683-1691, June 2022, doi: 10.1109/TMECH.2021.3087196.
Extra Notes
Will use colored pigment. Will use glow in the dark pigment.