For our project, we are aiming to create a garden of plants that react to touch and are activated pneumatically.
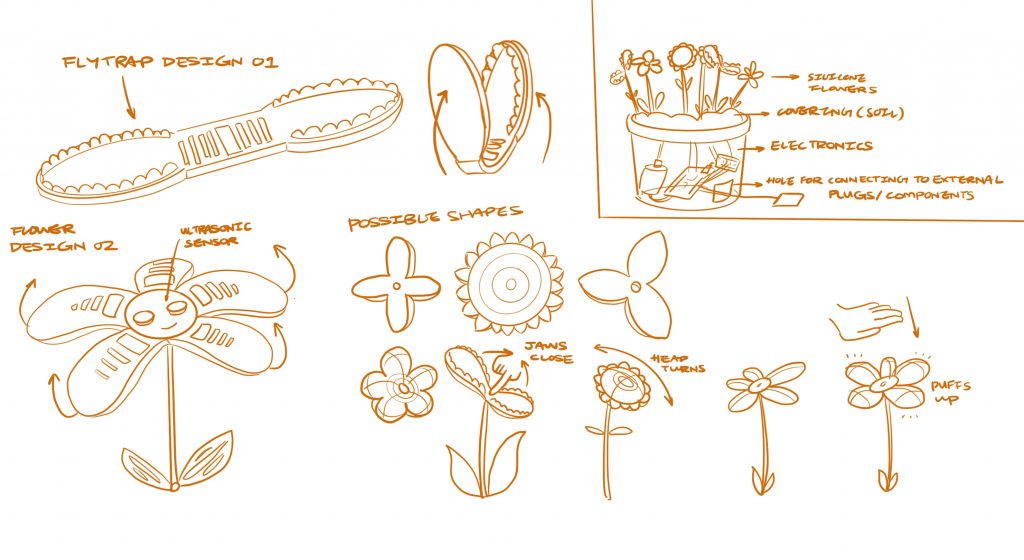
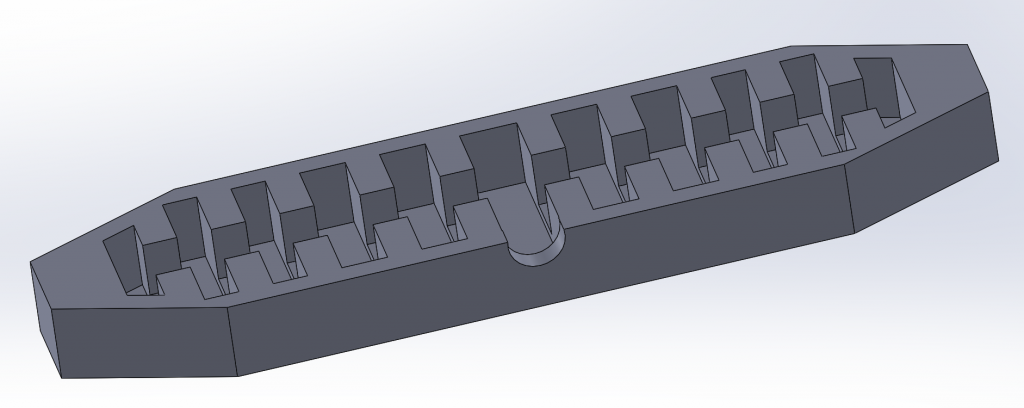
We are currently focusing on developing a design that mimics the movement of a venus flytrap. When touched, its jaws will bend upwards. To do so, we have designed 2 variations as prototypes to test movement, which we have cast in silicone.


We are also investigating different ways to detect touch, such as through a CTS breakout board, ribbon sensor, and a square FSR
We also have some sketches of what we would ideally like to achieve with different flower forms and movements.