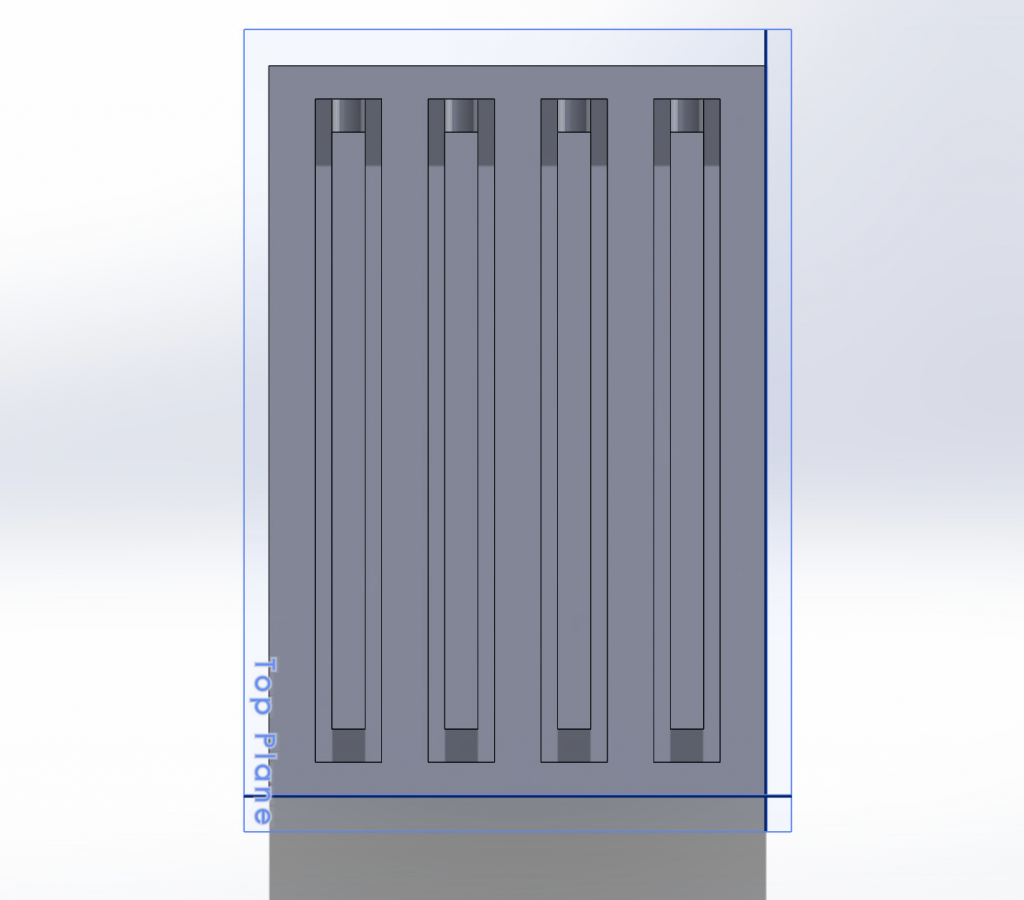
Our proof of concept has gone through some revisions – we’ve simplified the design to be two chamber. With only a two chamber design, we can still accomplish our goal while making less work for us. In addition, we’ve faced some difficulties figuring out how to design a cylindrical mold, so the proof of concept design was revised to be rectangular. This is something we will need to fix for the final project, but it is alright for the proof of concept since our goal of this test is to experiment with the movement of our actuator. As of writing this post (2:45 pm 3/1/2023), our part is still being printed, but it should be done by the end of the day.

We were given the circuitry for the capacitor sensor. While we didn’t work on this ourselves, it is a great first step to what we hope to accomplish.

Also worth talking about is our original designs for the mold. Our original mold designs were failures, but worth talking about since they were our first experimentation with silicon molds. They were designed to imitate the look of our project but not the functionality. The top section of Elise’s was too thin and had holes in it. Leah’s had some sizing issues with the hole to insert the piping, and it failed to completely seal when putting the two halves together.

That said, we used our original molds to test the capacitor sensing, and we realized that we ran into a problem. Though it seems obvious in retrospect, inserting the wire into the mold caused the capacitor to constantly be true – it sensed something (the silicon mold and piping) nearby.

UPDATE: the calibration of the capacitor can make this work. The capacitor doesn’t sense the mold, but can sense a hand in close proximity through the silicon. More work is required to fully understand what is happening. It is really finicky, alternating between just always being true, working just right, to requiring direct touch to the wire to sense the hand.