Dunn Zhang and Elliot Frankel
53399 Creative Soft Robotics
Project Objectives
The objective of this project was to utilize soft materials and a material class called “auxetics” to demonstrate the ways that shape and form can create unexpected actions and reactions. These metamaterials, so called due to their properties depending on their shape as well as the material they are made of, have a negative poissons ratio, which means they expand in two dimensions under a single axis load. Compared to traditional materials, this creates an unexpected and visually distinct effect that gets the viewer thinking more about shape and motion.
Creative Design Opportunities
Fabricating our auxetic designs using silicone materials allowed us to test the designs from established literature and modify them. The iterative process enabled us to test these structures at different scales, thicknesses, and densities to create the most dynamic and interesting patterns when applying tension. To avoid unnecessary work, we used the built-in stress simulation in Solidworks to make educated predictions on how the material will behave. The silicone fabrication process verified the relative accuracy of the simulation, which reduced our iterative workload significantly.
Not only does the fabrication process validate our assumptions, but it also allows us to modify and experiment with the current iteration. Using Rhino Grasshopper, we transformed and wrapped the grid-like design. However, the simulation was unable to manage the complexity of the form. Therefore, we had to cast and test the silicone with our hands.
Overall, the soft technologies and the fabrication process allowed us to iterate, improve, and realize our designs.
Process
Research
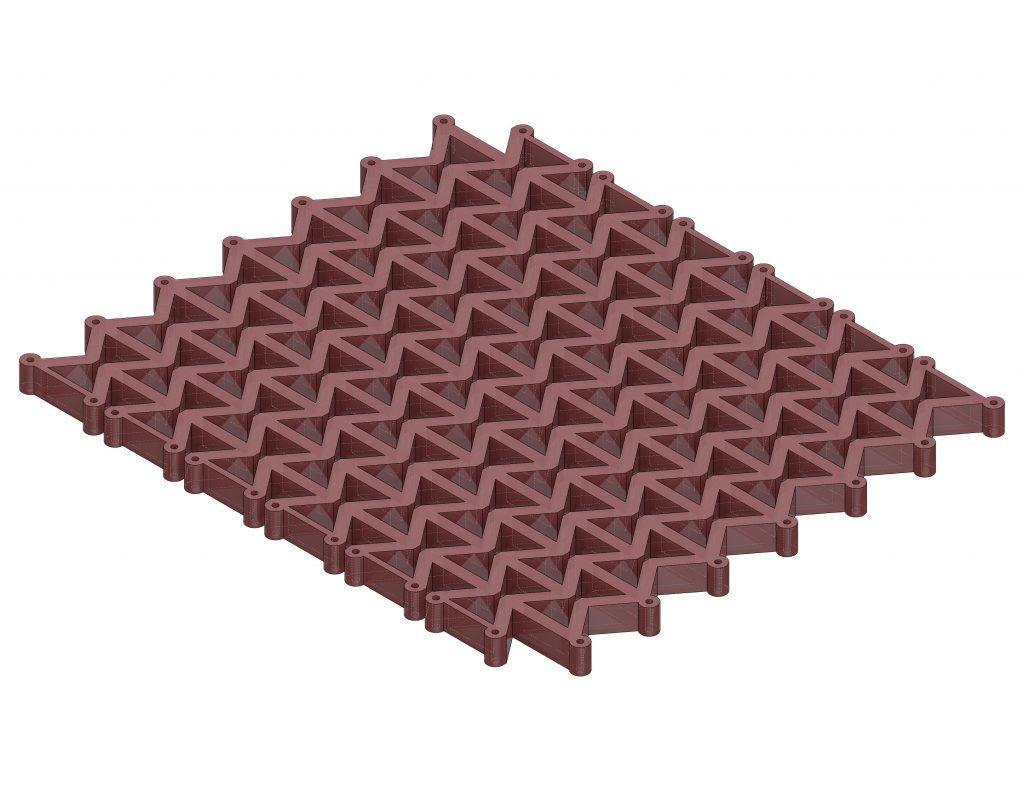
Our first step was to find past designs that had been proven to work. A deep dive into literature allowed us to find 4 main categories that we ended up modeling and testing. Each of these had distinct visual and motion properties, which we were only able to find out by running FEAs on the designs that we made. Further research allowed us to refine our designs, both by reviewing literature and by validating new designs. This allowed up to pare down the options to a few final designs that we would end up presenting. Our aim was to find unique angles on these auxetic designs by changing parameters, such as taking away links or distorting the mesh. Our continued testing process allowed us to create the most interesting effects on our final designs.
Digital
We used Rhino to create some of the existing auxetic designs from the previous research literature to design the 3D-print mold. This process was relatively quick and straightforward; however, we encountered the most difficulty transforming a design in Grasshopper.
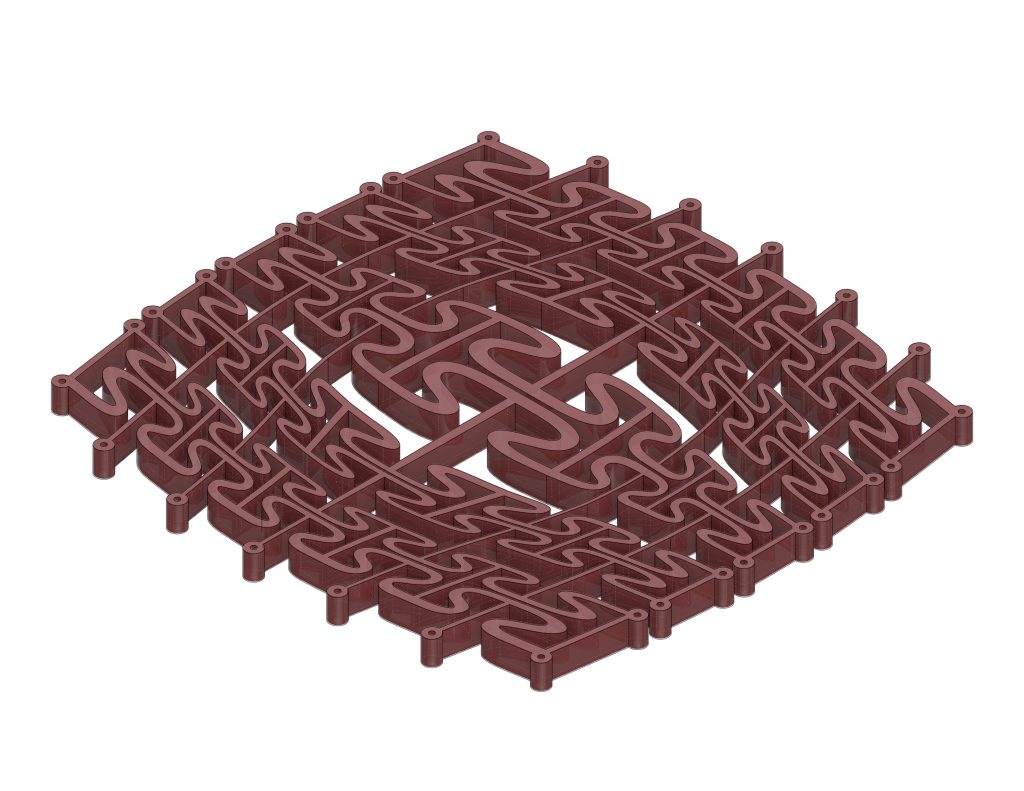
Garth gave us the idea of adjusting an existing design, usually in a grid-like pattern, to see the outcome of such a transformation. This suggestion led to us developing a complex parametric Grasshopper script that uses attractor points and parameter controls. We could modify an existing pattern into two new patterns: expansion and contraction. However, due to issues with the scale and sizing of components, the contraction iteration could not be displayed at the final critique on April 26th.
Physical
As previously stated in Creative Design Process, casting silicone allowed us to verify our simulation results and test for new designs, but it also helped us to fine-tune the thickness and density of our designs. In our earliest iteration, we used one of the softer mixes of silicone, which resulted in the mesh failing structurally and breaking. Learning from our poor choice of materials, we opted for the stronger mix of silicone, which worked out great in the end. The stronger mix allowed us to apply more stress pressure on our mesh and realize its full structural potential.
Outcomes
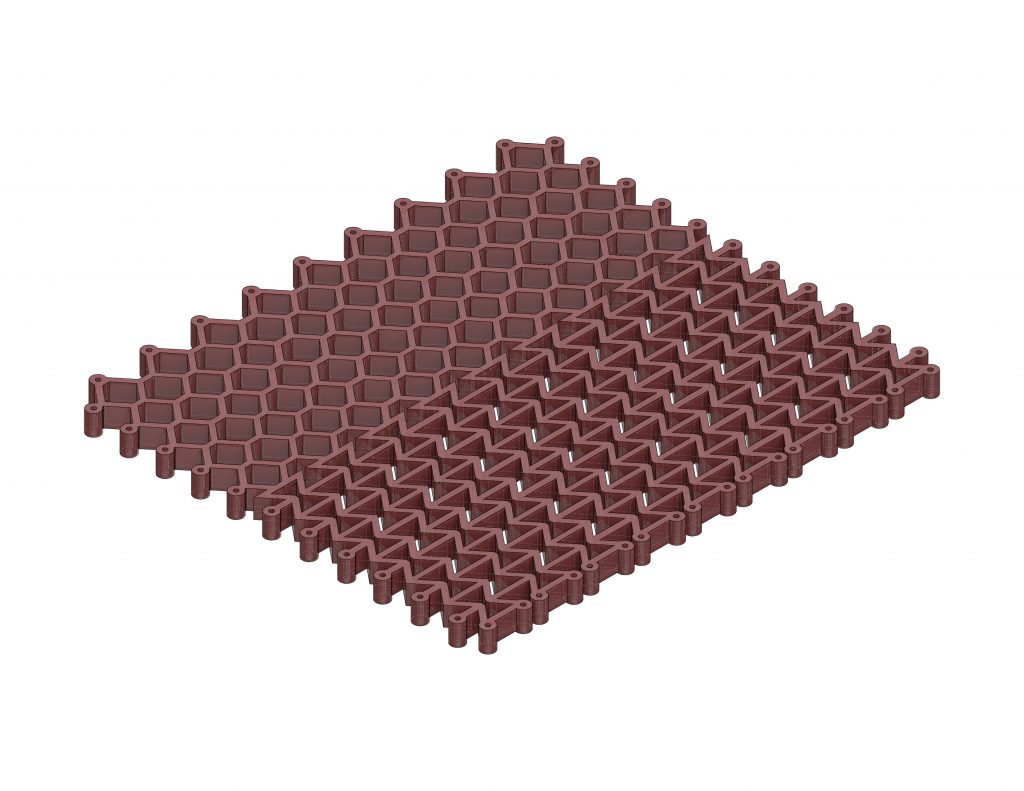
The final three designs we chose were a uniform auxetic, a mesh of hexagons and auxetic combined, and one curved auxetic that was warped using an attractor point. These provided an interesting sequence of behaviors: the uniform introduces what an auxetic is, the combined contrasts that with an expected and known material, and the warp provides distinct and new interaction.
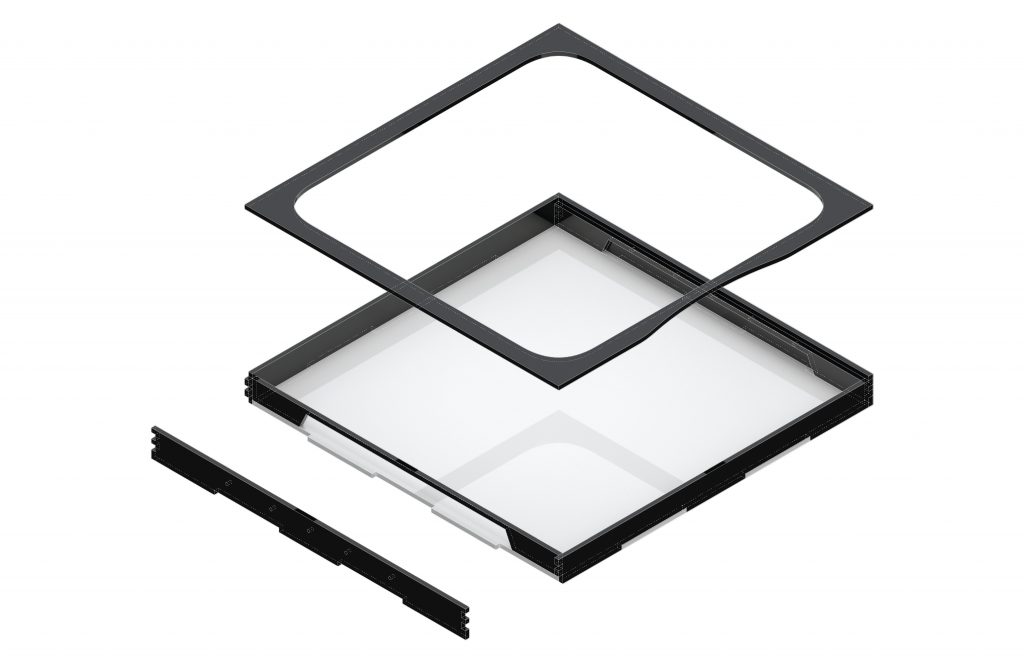
To house these meshes, we designed frames that served three main purposes. The first was to provide a solid way for the viewer to interact with the pieces. The frames had handles on them that attached to the meshes, allowing for distortion in a controlled, planned manner. The second purpose was to allow for a reference point that would show how much the mesh distorts. Being housed in a constant area while the form expands draws attention to how the shape of the mesh changes. The final purpose of the frame was to provide a way to lift the mesh off the table, which allowed for lighting effects. Since these meshes are very distinct in their shapes, we wanted to highlight how they interacted with light. We decided that shadow effects would be most interesting, and set up two above spotlights to create unique shadow effects under the frames.
Throughout the process, we learned that we should have tested our models physically more, rather than relying on the FEA for the designs. Having more physical models would have allowed us to develop more interesting shapes and behaviors. We also learned to focus more on the true purpose of the project. During each step, we tended to lose sight of the big picture, and instead focused on applications. We were guided to be more pragmatic and think about how each decision impacted the artistry of the piece, rather than trying to rush for an interesting application.
However, this project was certainly a success by our own standards. We were able to create really interesting and unexpected behaviors from our auxetic meshes. We succeeded in our purpose of making surprising and pleasing deformation, and the hands on aspect of the final designs helped in this effect. The viewers during the final presentation were really taken by surprise with the behavior of these meshes, which is exactly what we hoped for.
Video & Images
Citations & Supplemental Materials
Mizzi, Luke, et al. “Auxetic Metamaterials Exhibiting Giant Negative Poisson’s Ratios.” Physica Status Solidi (RRL) – Rapid Research Letters, vol. 9, no. 7, 2015, pp. 425–430., https://doi.org/10.1002/pssr.201510178.
Ren, Xin, et al. “Auxetic Metamaterials and Structures: A Review.” Smart Materials and Structures, vol. 27, no. 2, 2018, p. 023001., https://doi.org/10.1088/1361-665x/aaa61c.
Pan, Qi, et al. “Programmable Soft Bending Actuators with Auxetic Metamaterials.” Science China Technological Sciences, vol. 63, no. 12, 2020, pp. 2518–2526., https://doi.org/10.1007/s11431-020-1741-2.
Grasshopper Script:
https://drive.google.com/file/d/17Q0tD4kFrwGaWCBIePoLLMq2cEud6FP1/view?usp=sharing
Final Product & Frame Designs:
https://drive.google.com/file/d/1mG3Nu2QUIlcHzCPTOhHCXspGPzkfqKoY/view?usp=sharing
Contributions
Dunn: 3D printing molds, final mesh casting, frame design, frame cutting and assembly, Rhino modelling, attractor point setup
Elliot: Literature review, design selection, auxetic casting, frame cutting and assembly, FEA simulations, lighting and presentation setup, model cad for some meshes