“3pi Chaser” Prototype
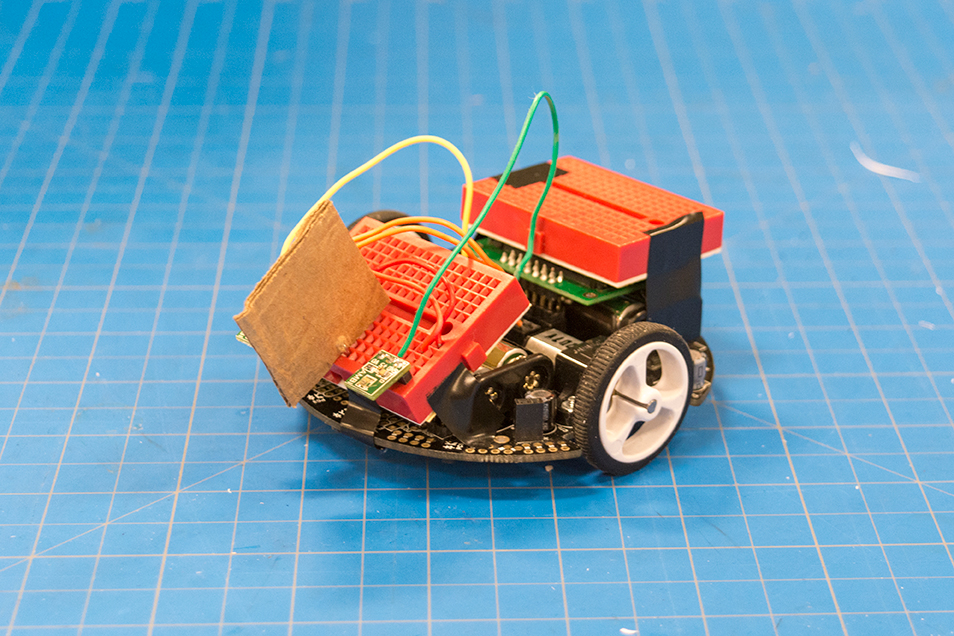
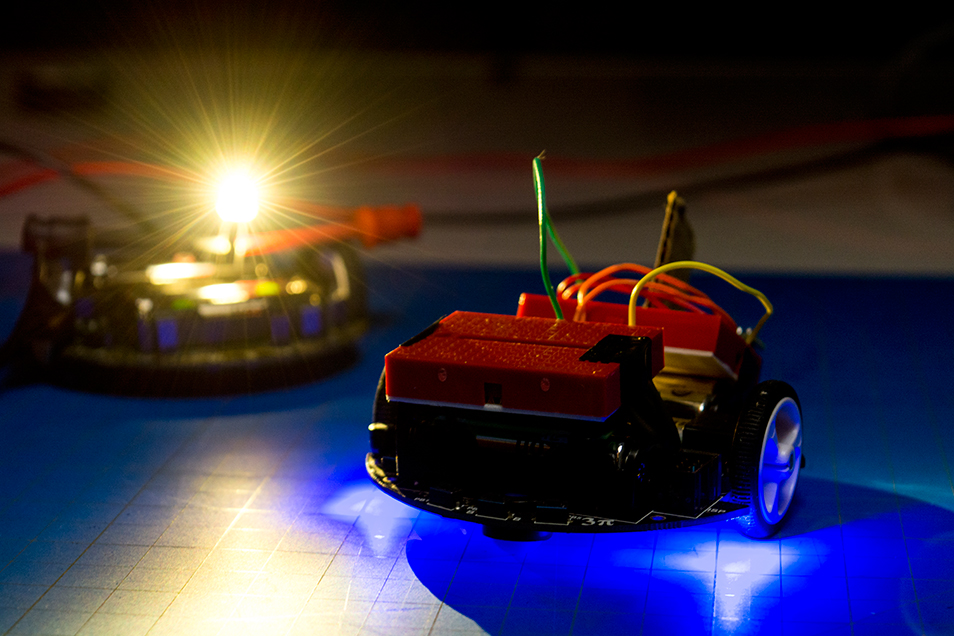 We aim to stage a small drama between two robotic actors; one acting as pursuer, and one as the pursued. We will program their personalities and predispositions towards each other, and from these a physical interaction will emerge as they interact. Through finessing the actors’ behaviors and designing their physical appearances, we’re exploring the line of what makes simple mechanical actions trigger humanly emotional relatability. At present, we are using light as the medium of the robots’ interaction; the chaser robot has a bright headlamp, and the other has a set of ambient light sensors on either side of it providing feedback to its wheels. If neither sensor detects a large amount of light, the robot simply moves straight while if it detects an amount above the threshold, it gets scared and moves away. If only one side detects light, that side’s motor speeds up and turns away from the light. For the current iteration, the chaser robot is running a simple line following program. Current working version of our code can be found here. YouTube / Dan Sakamoto – via Iframely
|