Final Project: Spark Wand v2
|
For my final project for physical computing, I decided to advance with my progress on the Spark Wand. If you want to see how my part has evolved from it’s last primary iteration, the link to that is: The Spark Wand is part of a multidisciplinary theatrical project integrating quadcopters, a controller (the spark wand), motion-capture technologies and an actor controlling the system. The system of operations is integrated together using what is known as the Robotic Operating System (ROS). ROS does a great job at being able to get signals and operations between multiple software and systems working together in a cohesive manner. As part of my assignment to this project, I had to communicate with ROS and I did this through ROSPy and I can show you what the results will look like. Working with the aerial robotics lab and some of the members involved in the project, I was able to create the first prototype of the Spark Wand. The reason why I call it that is because it uses a component called a Spark/Particle Photon. The Photon is a special Arduino-like micro-controller that has an integrated WiFi component that uses the same programming language as Arduino and has a bit more features like web-based development and browser-based testing. The primary reason I used this board was because of its convenient form factor. Its dimensions are 1.44 in. x 0.8 in. x 0.27 in. with headers on which is very convenient for making an easily-portable and lightweight controller/wand. However, the convenient form factor of the Spark/Particle Photon was only one of the things I was able to use to get a more convenient form factor for the controller itself.
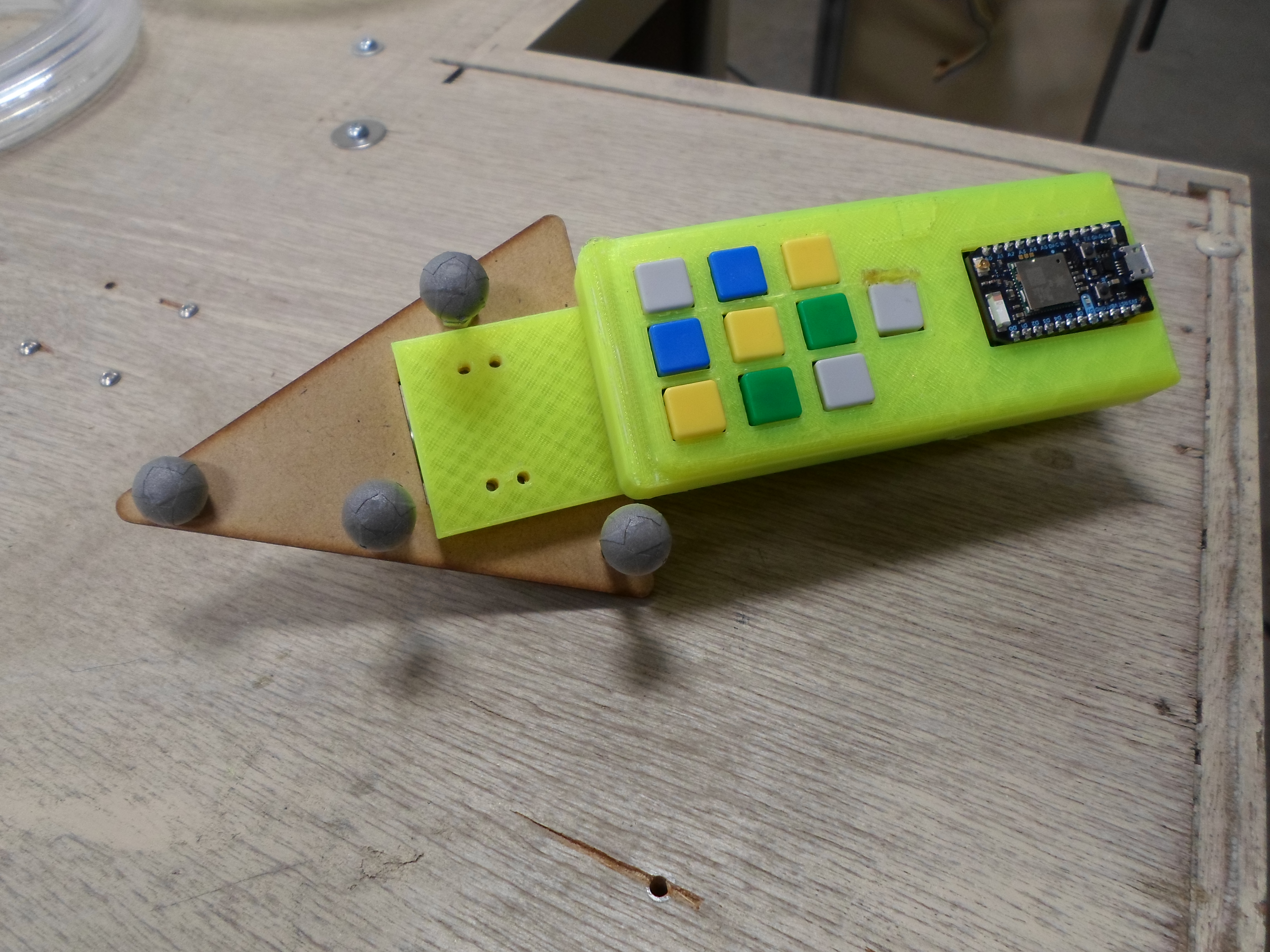
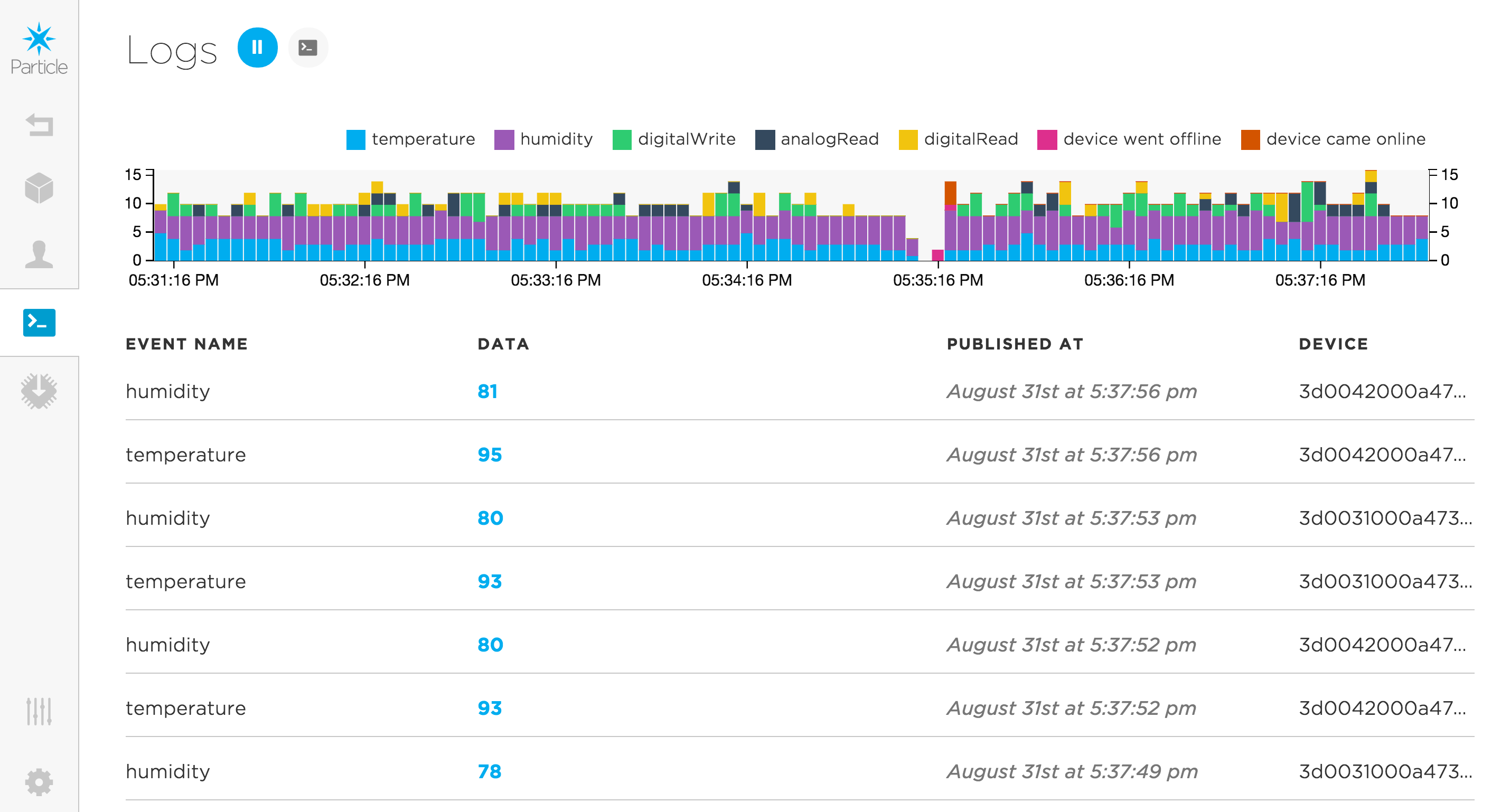
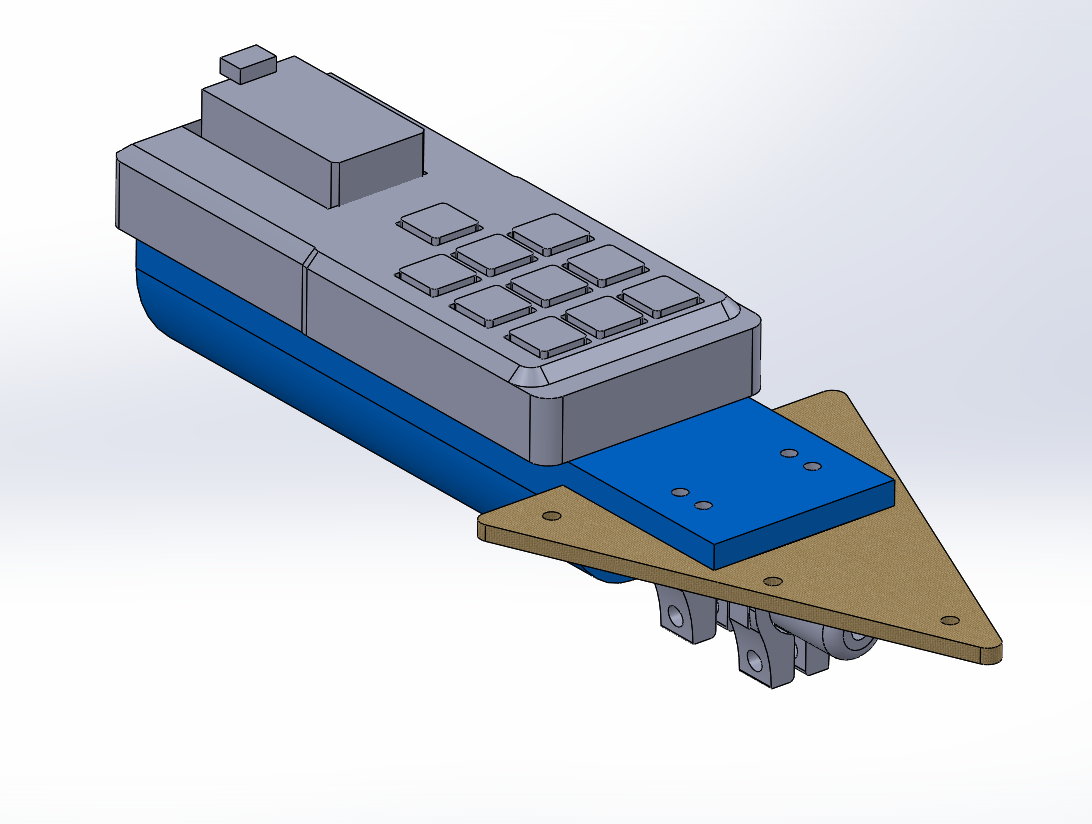
The controller itself comes with 10 buttons and a laser button that relay information into a “dashboard” that is included with the development provided by Particle and also sends information through ROS. The Dashboard lets me monitor the signals, counts how many times they come in and also provide me information of the time the signal is received and gives a graphical representation of it. An example of what it looks like is shown below:
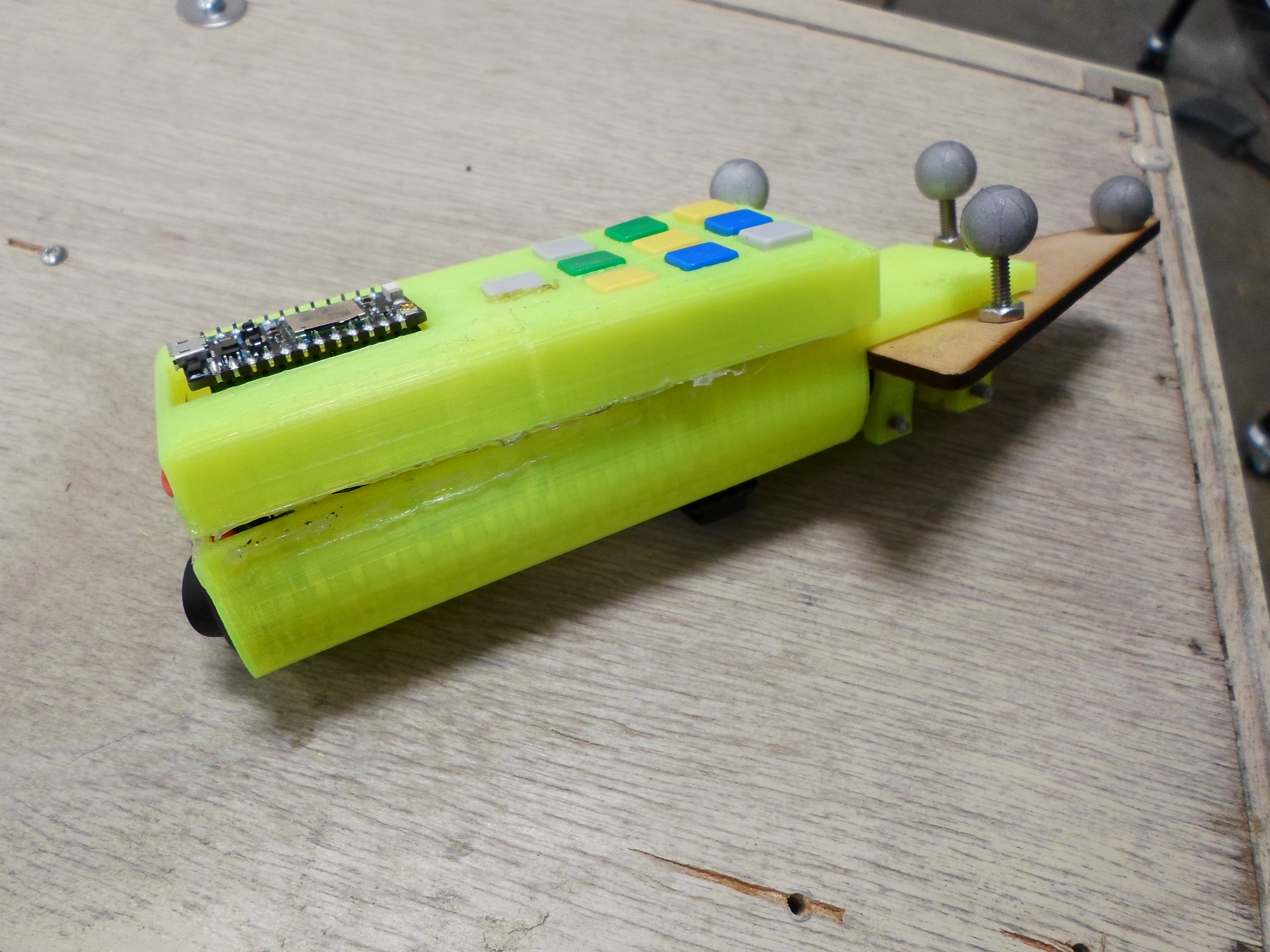
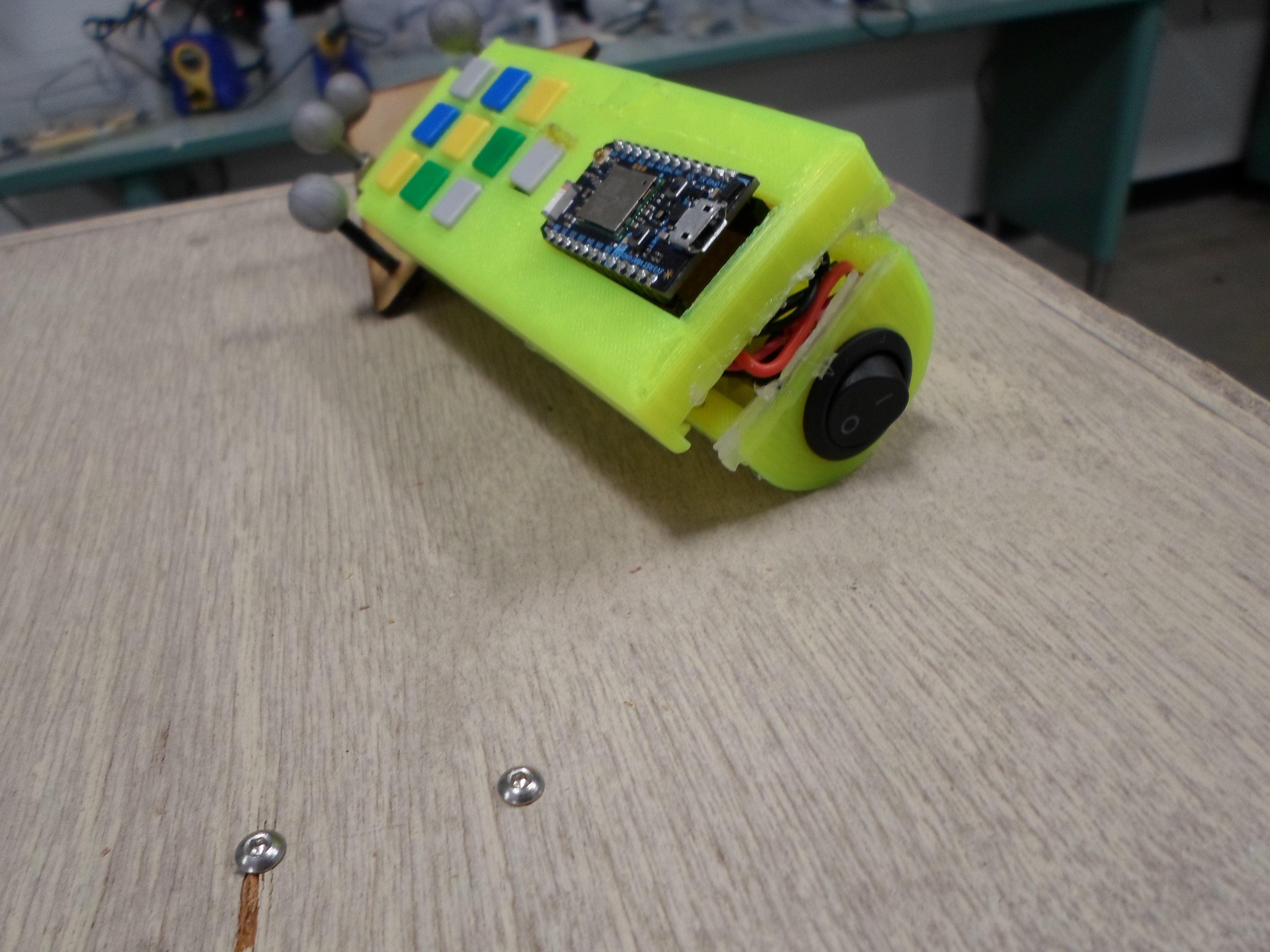
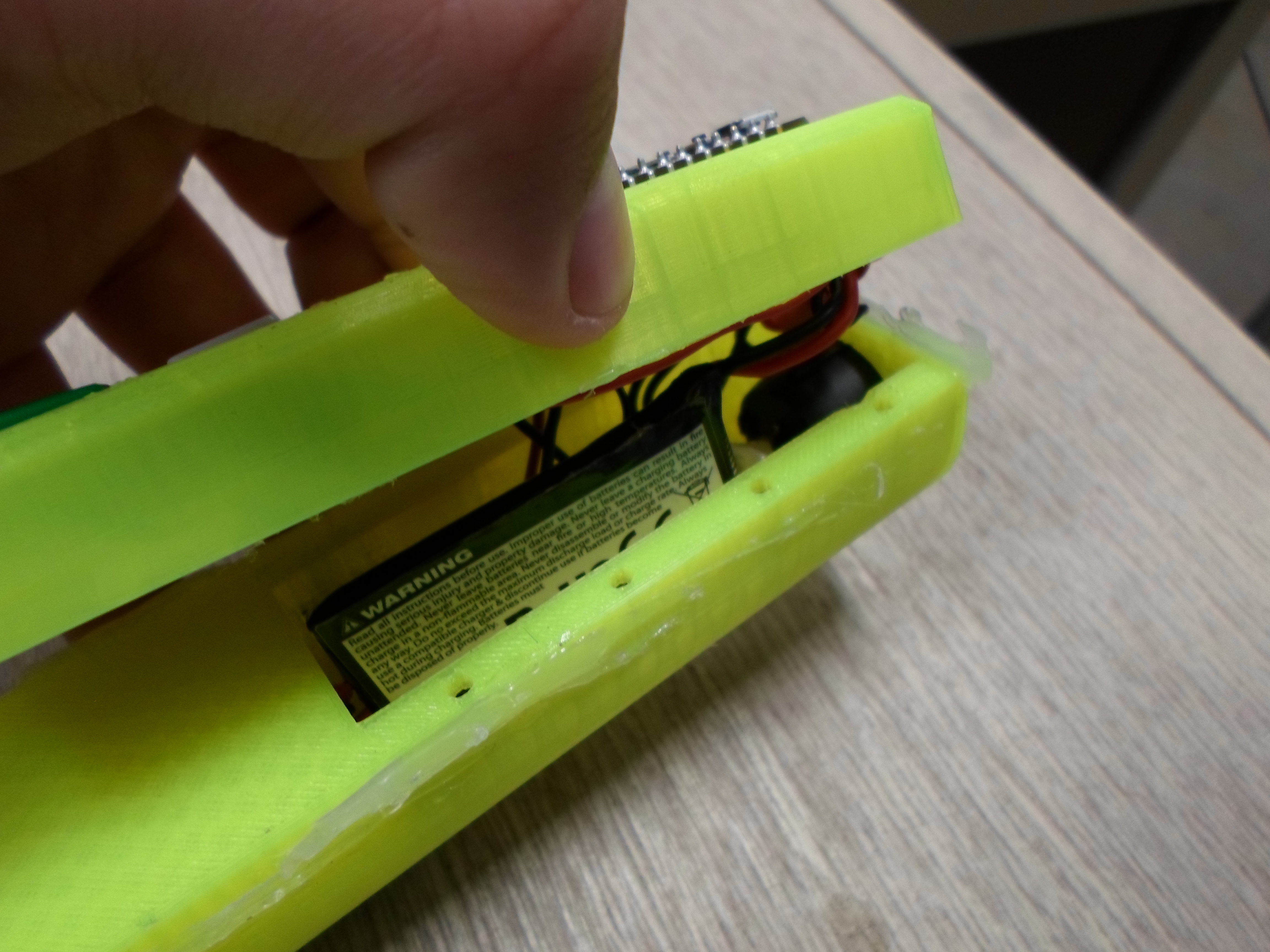
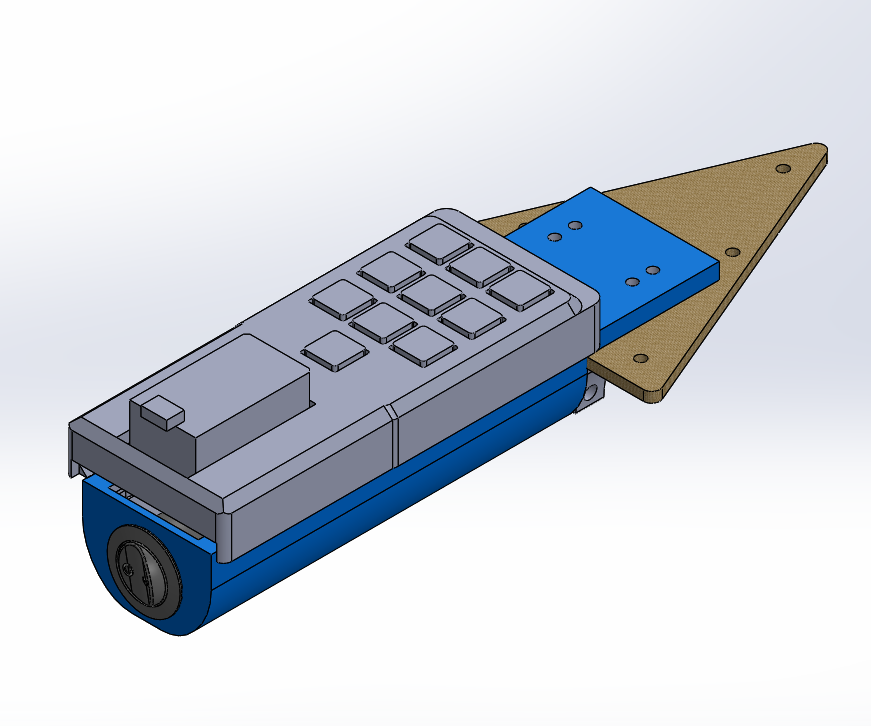
The wand is made to be comfortable, easy to use, and lightweight with no external wires or cables. The latency experienced with a system with even decent connection to WiFi not noticeable and provides reliable results. In this revision of the project, I primarily focused on getting the form factor much sleeker and comfortable. The noticeable changes are that there are no exposed wires. I was able to do this by shielding the robot with a 3D-printed case that housed all of the components, the buttons and let the photon exposed for feedback and access.
Some of the main features is an on/off switch that allowed for power control. A 1C LiPo battery in order to provide power with a sleek packaging. Personalized grippers to house the customized laser pointer in order provide space but keep the laser at a constant position. And a protoboard with all of the wires and buttons in one compact form factor.
|