Mobile Robot: “Explorers”
|
Explorers is a simplistic model for how humans learn to interact with their environment. To accomplish this, we implemented a machine learning algorithm using Markov Chains which allows the robots to make decisions based on its current state as well as its previous actions. In this way, the robots are introspective and can draw from their “short term memory” in their decision making process.
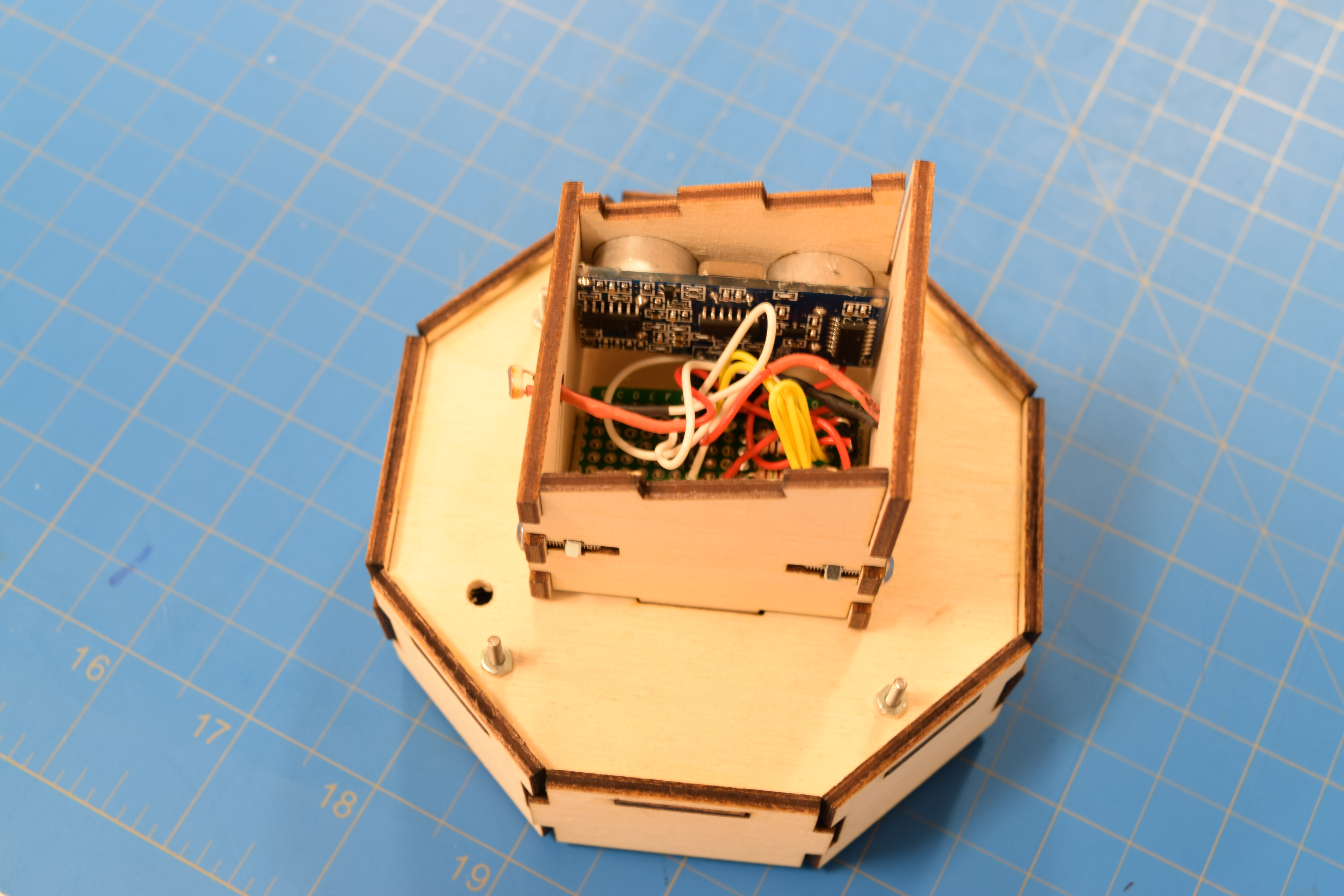
When the robots first interact with the environment, they only have a basic self-preservation instinct which is to not leave the black rectangle. As they begin to explore their environment, they also make mistakes such as crashing into objects thus changing or destroying their environment. Additionally, outside participants can induce stimuli by shining the robots with a flashlight. The robots can then choose whether they will respond to this stimuli, similarly to the way humans choose to respond to uncontrollable environmental stimuli. Over time, each robot develops a different set behaviors based on its individual experiences in a particular simulation. However, both robots will converge to a set of behaviors in which they respect their environments. YouTube / arathorn593 – via Iframely We constructed this project using a Pololu 3pi Robot. We focused on using an ultrasound distance sensor and photoresistors as our sources of input and programmed the robot to learn how to maneuver around obstacles and potentially avoid bright lights. With respect to the design of the robot, we wanted to create a playful, friendly atmosphere to create empathy between the spectators and the robots rather than making them seem like machines.
Documentation: |