Mobile Robot: “Scaredybots”
|
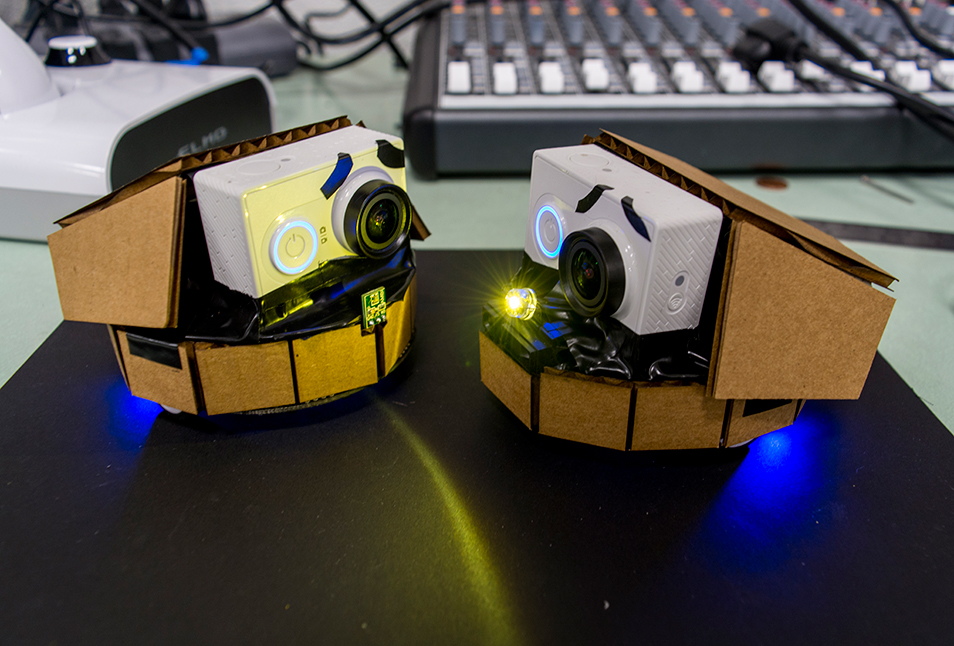
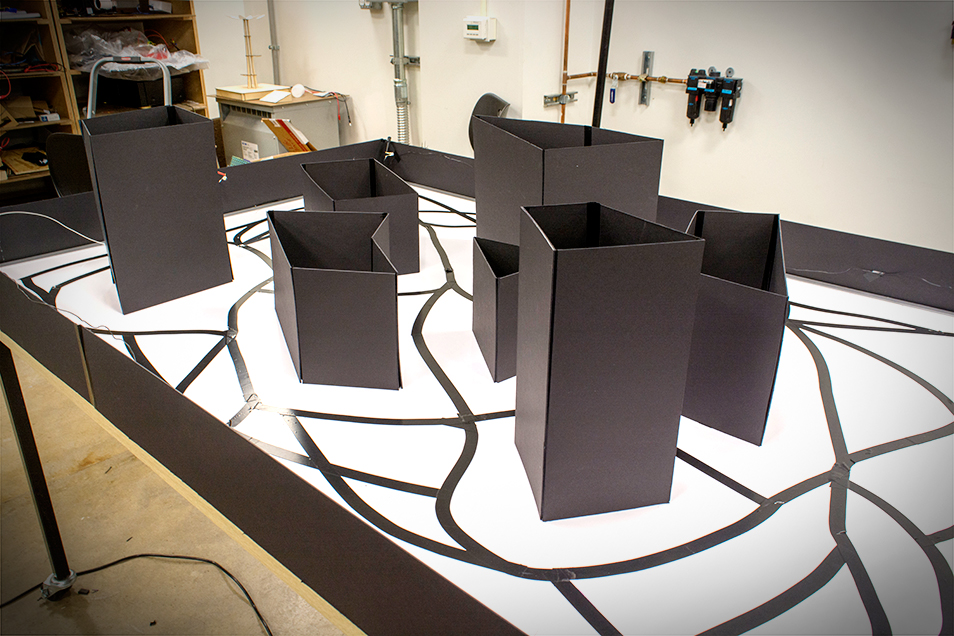
YouTube / Dan Sakamoto – via Iframely Scaredybots is a scene in which two creatures trapped in a labyrinth, searching for a way out. Each has a single sense for detecting danger; one can detect light, the other can detect physical objects. Although they don’t pose a threat to each other, each possesses a trait that makes it frightening to the other. As they are left to explore and interact with each other, we are able to simultaneously observe them from above, as if creatures in a zoo, or we can witness their struggle from their own point of view.
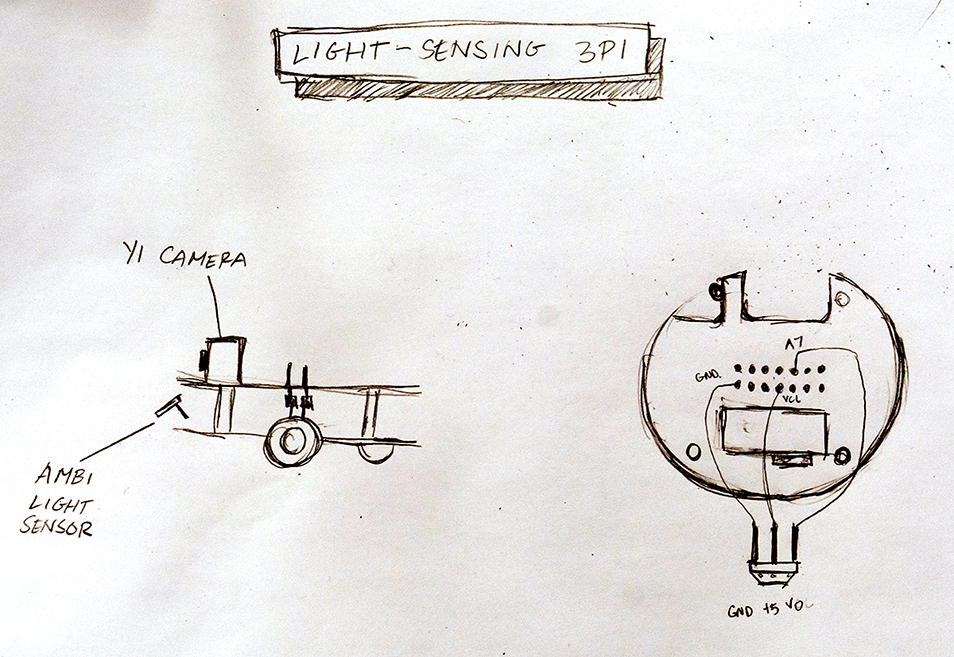
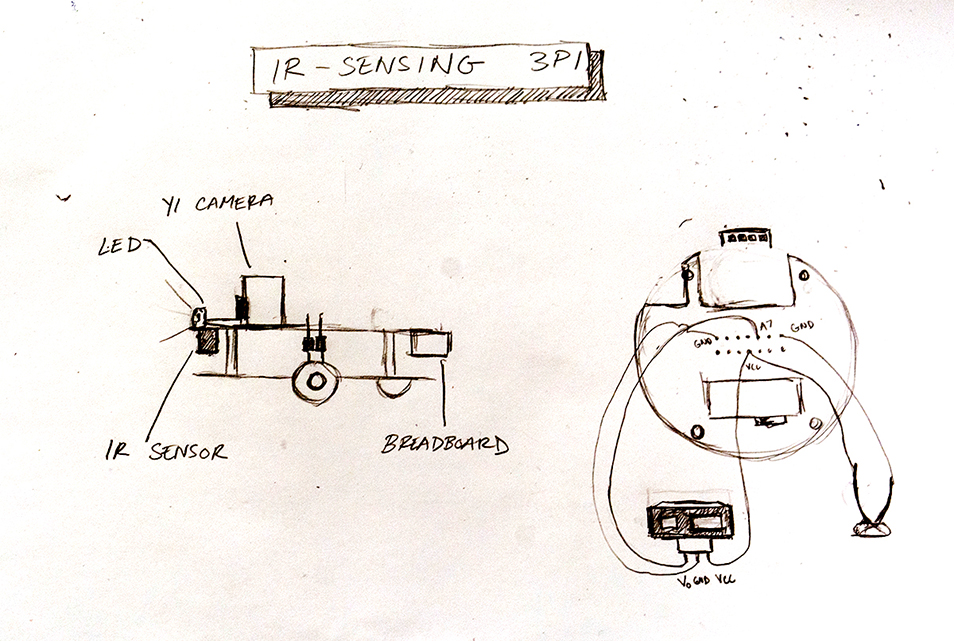
One robot (Po) has a proximity sensor and a light while the other (Lulu) has an ambient light sensor. Both are programmed to jump backwards, turn, and start heading in another direction when they sense anything. Hence, the robots are both scared of each other and scared of things encountered in the environment. Under normal circumstances, the robots follow lines on a course– that is, until fright leads them off track. By playing with the actors’ behaviors and physical appearances, as well as the scale and perspective of the audience experience, we explore the boundaries between simple mechanical actions and their relatability as human emotions. 3pi code: github.com/dansakamoto/3pi-chaser Circuit diagrams:
Scaredybots was created by Roberto Elorza Andaya, Kiran Matharu, Rachel Nakamura, and Dan Sakamoto. |