Exercise: Read Ultrasonic Ranger¶
Objective¶
Measure distance using a time-based process. Use the serial port for debugging.
Some processes we measure in the world involve measuring time. A sonar ranger emits a pulse of sound and measures the time it takes to reflect from an object back to the source. The distance is not itself a temporal quantity, but the dynamic process maps that distance to a time interval.
Steps and observations¶
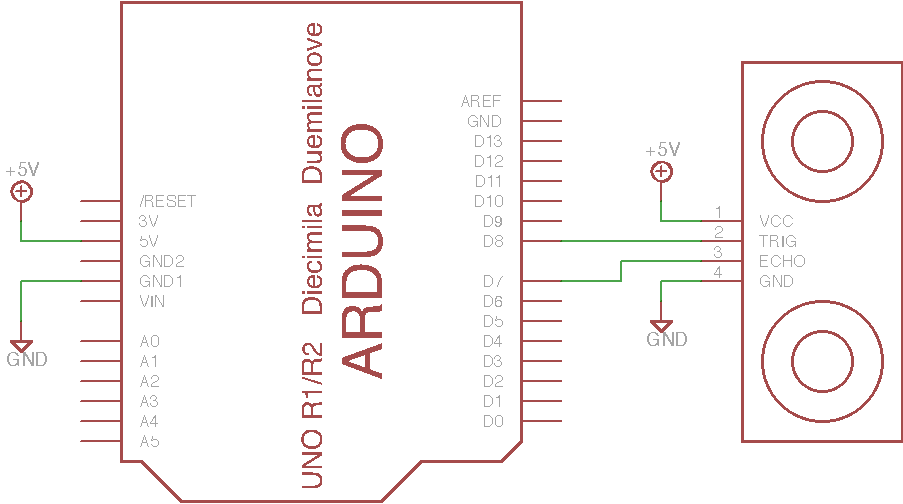
- Wire the circuit on the breadboard using the HC-SR04 Ultrasonic Ranger. Note that this module has one digital trigger input and one digital echo output.
- Load and run the ReadSonar sketch.
- Within the Arduino IDE, open the serial monitor console and make sure it is set to 9600 baud.
- Observe the numbers printed in the serial monitor as you place a hard object a short distance in front of the sensor. It may take some time to find an object and orientation which yields a reliable signal.
- Estimate the precision of the measurement. Is the scaling correct? Is there an offset error?
Comments¶
This exercise is a good opportunity to learn to use an oscilloscope. The DMM excels at measuring constant voltages, but cannot show how a signal varies over time. The oscilloscope plots voltage versus time at a wide range of time scales. It includes many controls designed to help select the specific intervals of interest from a waveform, in particular, triggering each sweep at a particular voltage and slope.
Arduino Code¶
- Documentation: ReadSonar Arduino Sketch
- Sketch Folder: ReadSonar
Other Files¶
- EAGLE file: read-sonar.sch