
Graded Projects
Autonomous Robot Part 2 – Waddle
Jake Scherlis- Designer, Vivian Qiu-Integrator, Myles Blodnick-Tutor, Scribe Introduction Waddle is a robot that explores the idea of an autonomous entity with an inherent personality achieved through different behaviors triggered by a variety of stimuli. Originally intended to embody an
Autonomous Robot Part 2 – Waddle
Jake Scherlis- Designer, Vivian Qiu-Integrator, Myles Blodnick-Tutor, Scribe Introduction Waddle is a robot that explores the idea of an autonomous entity with an inherent personality achieved through different behaviors triggered by a variety of stimuli. Originally intended to embody an
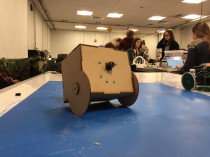
Autonomous Robot Part 2 – Bully Bot
Group: Kaan Doğrusöz as Tutor and Integrator, Jonathan D. Ortiz as Designer and Scribe Abstract The Bully Bot is an autonomous robot that recognizes and charges at the color red. Why We Did This Our goal was to create action
Autonomous Robot Part 2 – Bully Bot
Group: Kaan Doğrusöz as Tutor and Integrator, Jonathan D. Ortiz as Designer and Scribe Abstract The Bully Bot is an autonomous robot that recognizes and charges at the color red. Why We Did This Our goal was to create action
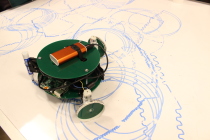
Autonomous Robot Part 2 – Donatello – The Turtle Bot
We started this project with the goal of creating a robot that makes its own art. Donatello is a simple robot designed to draw turtle graphics on whiteboard tables. Named after the teenage mutant ninja turtle, Donatello uses a two DC
Autonomous Robot Part 2 – Donatello – The Turtle Bot
We started this project with the goal of creating a robot that makes its own art. Donatello is a simple robot designed to draw turtle graphics on whiteboard tables. Named after the teenage mutant ninja turtle, Donatello uses a two DC
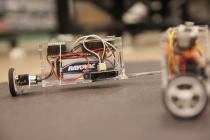
Autonomous Robot Part 2 – Ella and Chase
Group Members: Becca Epstein, Becca Wolfinger, Zade Delgros Roles: Becca Epstein as Tutor, Becca Wolfinger as Scribe/Integrator, Zade Delgros as Designer Introduction We have created two autonomous robots that share a common pivot to which they are constrained. They rotate about this central point
Autonomous Robot Part 2 – Ella and Chase
Group Members: Becca Epstein, Becca Wolfinger, Zade Delgros Roles: Becca Epstein as Tutor, Becca Wolfinger as Scribe/Integrator, Zade Delgros as Designer Introduction We have created two autonomous robots that share a common pivot to which they are constrained. They rotate about this central point
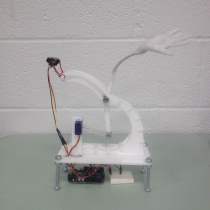
Autonomous Robot Part 2 – Autonomous high five machines
Kaitlin and I (Rachel) created two autonomous robots who have a conversation through high-fives. When one senses the presence of the other’s hand in range of it’s IR sensor it reacts with a high-five by actuating a servo. Video: Autonomous
Autonomous Robot Part 2 – Autonomous high five machines
Kaitlin and I (Rachel) created two autonomous robots who have a conversation through high-fives. When one senses the presence of the other’s hand in range of it’s IR sensor it reacts with a high-five by actuating a servo. Video: Autonomous

Autonomous Robot Part 2 – Search
Group Members (and Roles) Annabelle Lee (Scribe and Designer) Joe Mallonee (Designer and Tutor) Riya Savla (Integrator and Designer) Introduction Our project centers around the idea of finding substance in a world where Coca Cola can steal ground water, use
Autonomous Robot Part 2 – Search
Group Members (and Roles) Annabelle Lee (Scribe and Designer) Joe Mallonee (Designer and Tutor) Riya Savla (Integrator and Designer) Introduction Our project centers around the idea of finding substance in a world where Coca Cola can steal ground water, use

Autonomous Robot Part 2 – Acrobot
Group Members: Brian Yang and Luke Hottinger Roles: Brian Yang and Luke Hottinger as Scribes, Designers, Integrators, and Tutors Introduction The power of robotics is in creating autonomous robots that exhibit a behavior and responds to its environment. This is
Autonomous Robot Part 2 – Acrobot
Group Members: Brian Yang and Luke Hottinger Roles: Brian Yang and Luke Hottinger as Scribes, Designers, Integrators, and Tutors Introduction The power of robotics is in creating autonomous robots that exhibit a behavior and responds to its environment. This is
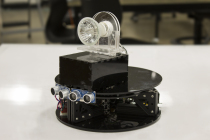
Autonomous Robot Part 2 – Watchdog
Group members: Daniel Hua, Jesse Klein Introduction Watchdog is an autonomous robot that keeps an eye on its surroundings and shines a light to investigate anything of interest. It uses two ultrasonic rangefinders to monitor nearby objects, scanning back and forth
Autonomous Robot Part 2 – Watchdog
Group members: Daniel Hua, Jesse Klein Introduction Watchdog is an autonomous robot that keeps an eye on its surroundings and shines a light to investigate anything of interest. It uses two ultrasonic rangefinders to monitor nearby objects, scanning back and forth

Autonomous Robot Part 2 – Tapeworm
Group Members: Jeffrey Houng, Miles Peyton Roles: Jeffrey Houng and Miles Peyton as Scribes, Designers, Integrators, and Tutors towards each other. Introduction: In this age of robots becoming smarter and smarter and where they are starting to emulate living/natural behavior, we
Autonomous Robot Part 2 – Tapeworm
Group Members: Jeffrey Houng, Miles Peyton Roles: Jeffrey Houng and Miles Peyton as Scribes, Designers, Integrators, and Tutors towards each other. Introduction: In this age of robots becoming smarter and smarter and where they are starting to emulate living/natural behavior, we
Autonomous Robot Part 1 – Ghosty
Ghosty is an autonomous little robot who is adventurous and loves to explore his surrounds. However, unlike a normal ghost, he doesn’t like to scare people. Instead they actually scare him! His vision line is a proximity sensor that tells
Autonomous Robot Part 1 – Ghosty
Ghosty is an autonomous little robot who is adventurous and loves to explore his surrounds. However, unlike a normal ghost, he doesn’t like to scare people. Instead they actually scare him! His vision line is a proximity sensor that tells