
Student Work
Final Project – Trio of Drawing Bots
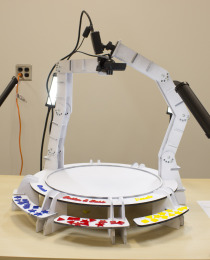
Group: Claire HentschkerIntroduction I wanted to create another iteration of the previous drawing robot, this time with three smaller robots that would not only react to their own lines, but also the lines created by the other robots. This interaction would augment
Final Project – Trio of Drawing Bots
Group: Claire HentschkerIntroduction I wanted to create another iteration of the previous drawing robot, this time with three smaller robots that would not only react to their own lines, but also the lines created by the other robots. This interaction would augment

Final Project – Columbina’s Companion
Group Members Akiva Krauthamer – Tutor Ruben Markowitz – Designer and Scribe Bryan Gardiner – Integrator Introduction Most people in the world are fairly familiar with the concept of an actor: a person who stands on the stage and delivers
Final Project – Columbina’s Companion
Group Members Akiva Krauthamer – Tutor Ruben Markowitz – Designer and Scribe Bryan Gardiner – Integrator Introduction Most people in the world are fairly familiar with the concept of an actor: a person who stands on the stage and delivers
Final Project – UltraSonic
Nkinde Ambalo, Horace Hou Introduction For our project, Ultrasonic, we created a device that tries to quantify a sense that we, humans, can’t sense. Using a microphone and a PureData patch we created a device that can sense ultrasonic sound
Final Project – UltraSonic
Nkinde Ambalo, Horace Hou Introduction For our project, Ultrasonic, we created a device that tries to quantify a sense that we, humans, can’t sense. Using a microphone and a PureData patch we created a device that can sense ultrasonic sound

Final Project – Like Me Harder
What we did We created a vibrating dildo that stimulates the user based on how many new Facebook likes (s)he has. Here’s how it works: Attach the dildo’s cord to the computer’s USB port Insert the dildo into desired orifice Run the program (dildo.py) on the computer Enjoy
Final Project – Like Me Harder
What we did We created a vibrating dildo that stimulates the user based on how many new Facebook likes (s)he has. Here’s how it works: Attach the dildo’s cord to the computer’s USB port Insert the dildo into desired orifice Run the program (dildo.py) on the computer Enjoy
Final Project – Computer Vision Sampler
The Team Kaitlin Schaer & Marc-Daniel Julien Introduction In our computer vision music sampler, we sought to create a physical interface that would allow the user to explore a song in a new way. Using computer vision software, a webcam, a
Final Project – Computer Vision Sampler
The Team Kaitlin Schaer & Marc-Daniel Julien Introduction In our computer vision music sampler, we sought to create a physical interface that would allow the user to explore a song in a new way. Using computer vision software, a webcam, a

Final Project – Whereband
Jeffrey Houng Jesse Klein Zac Mau We developed the Whereband to help active individuals come together to create a better exercising experience. The Whereband uses a Light Blue Bean to broadcast its GPS coordinates to a database, from that point
Final Project – Whereband
Jeffrey Houng Jesse Klein Zac Mau We developed the Whereband to help active individuals come together to create a better exercising experience. The Whereband uses a Light Blue Bean to broadcast its GPS coordinates to a database, from that point
Autonomous Robot Part 3: Ghosty
Introduction Ghosty is an autonomous little robot who is adventurous and loves to explore his surroundings. However, unlike a normal ghost, he doesn’t like to scare people. Instead they actually scare him! In our most current version of Ghosty, his
Autonomous Robot Part 3: Ghosty
Introduction Ghosty is an autonomous little robot who is adventurous and loves to explore his surroundings. However, unlike a normal ghost, he doesn’t like to scare people. Instead they actually scare him! In our most current version of Ghosty, his
Final Project – Non-Newtonian Composition
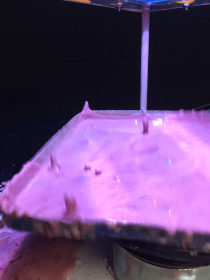
Group members/Roles: Aditi Sarkar and Becca Epstein as Tutors, Integrators, Designers and Scribes Introduction Our project explores the properties of non-Newtonian fluids, specifically oobleck. We created a theater and manipulated the stage to see the different forms and motions it created in
Final Project – Non-Newtonian Composition
Group members/Roles: Aditi Sarkar and Becca Epstein as Tutors, Integrators, Designers and Scribes Introduction Our project explores the properties of non-Newtonian fluids, specifically oobleck. We created a theater and manipulated the stage to see the different forms and motions it created in

Final Project Sketch – Clip on drawing bot
Team: Claire Hentschker Plan: For this project I plan to make a set of clip on drawing apparatuses that will activate an object they are attached to, turning anything into a drawing machine. Each set of clips will have a sensor,
Final Project Sketch – Clip on drawing bot
Team: Claire Hentschker Plan: For this project I plan to make a set of clip on drawing apparatuses that will activate an object they are attached to, turning anything into a drawing machine. Each set of clips will have a sensor,
Final Project Sketch – Columbina’s Companion
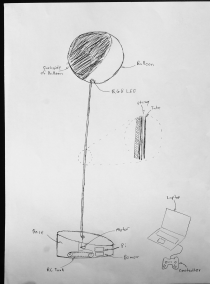
This is the diagram of our actor robot. The base is a Rover 2.0 tank RC robot. The head is a helium balloon. The center arm can bend down when the motor at the base tightens a string running up
Final Project Sketch – Columbina’s Companion
This is the diagram of our actor robot. The base is a Rover 2.0 tank RC robot. The head is a helium balloon. The center arm can bend down when the motor at the base tightens a string running up