|
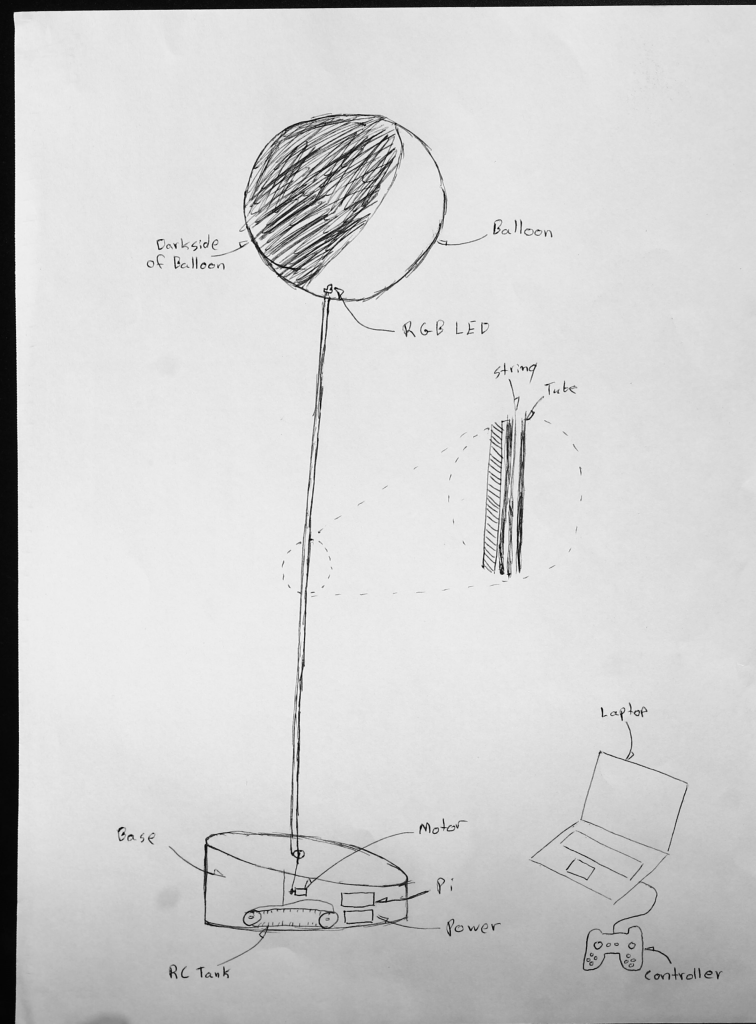
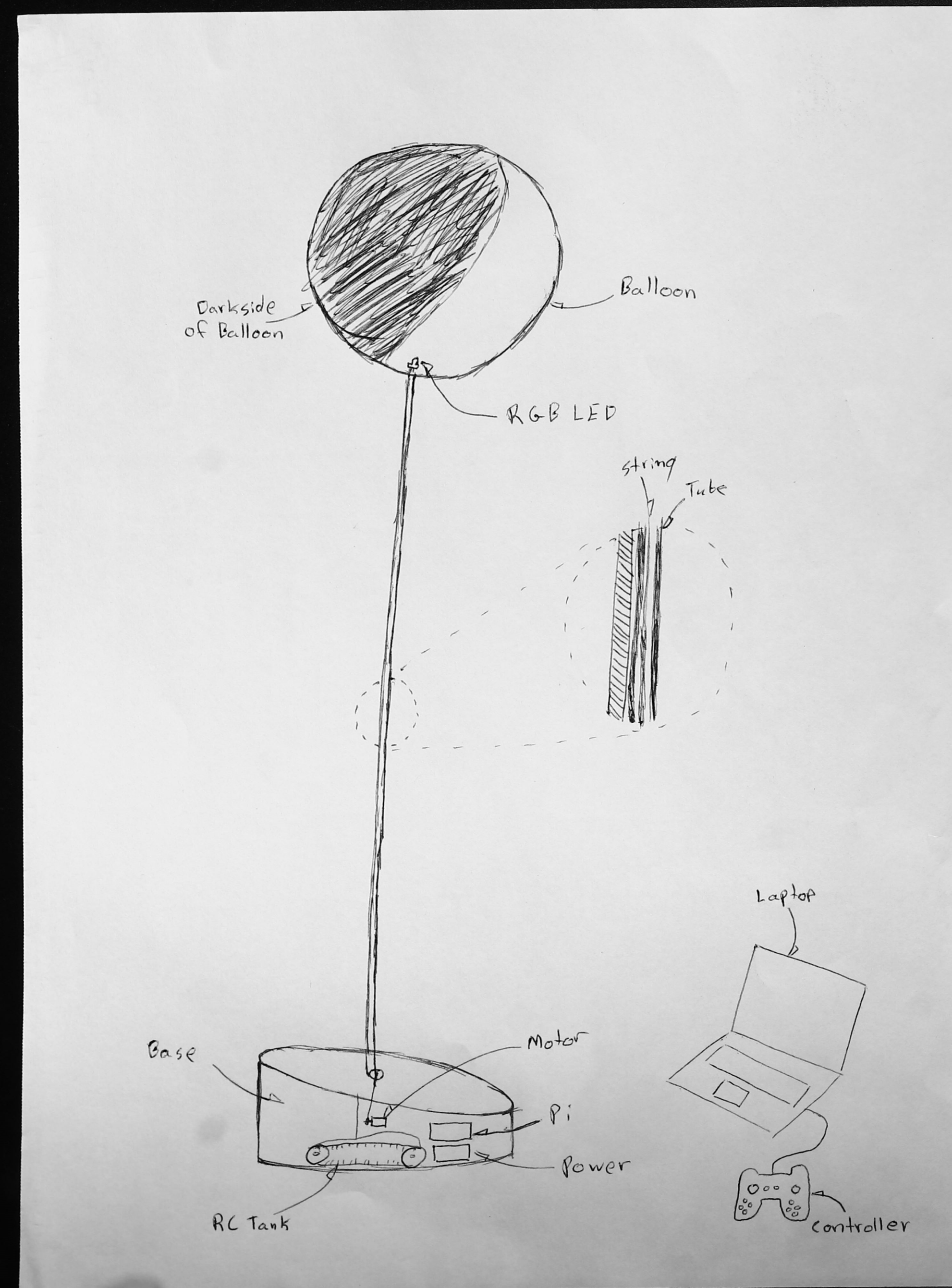
This is the diagram of our actor robot. The base is a Rover 2.0 tank RC robot. The head is a helium balloon. The center arm can bend down when the motor at the base tightens a string running up the arm. Everything is controlled from a game controller connected to a laptop.

These are a few alternative design idea’s that we’ve been toying with.
|