| Group: Claire HentschkerIntroduction
I wanted to create another iteration of the previous drawing robot, this time with three smaller robots that would not only react to their own lines, but also the lines created by the other robots. This interaction would augment the drawings created based on the movement of all three robots in space, and the duration of time they have been running for. The more lines there are, the more frantic the drawing become.
Technical Notes
I used one gearhead motor, used with the DRV8833 motor driver on the light blue beans pwm pins to control direction. This allowed me to wirelessly control the movement of the robots. I also used the QTR-1RC reflectance sensor to check whether the bot passes over a place it has already drawn. I used Rhino to model the box and the arm and colorful acrylic for the parts. A shaft collars on the hinge of the arm allowed for the rotation and a screw held the arm onto the motor.
Schematic and Code
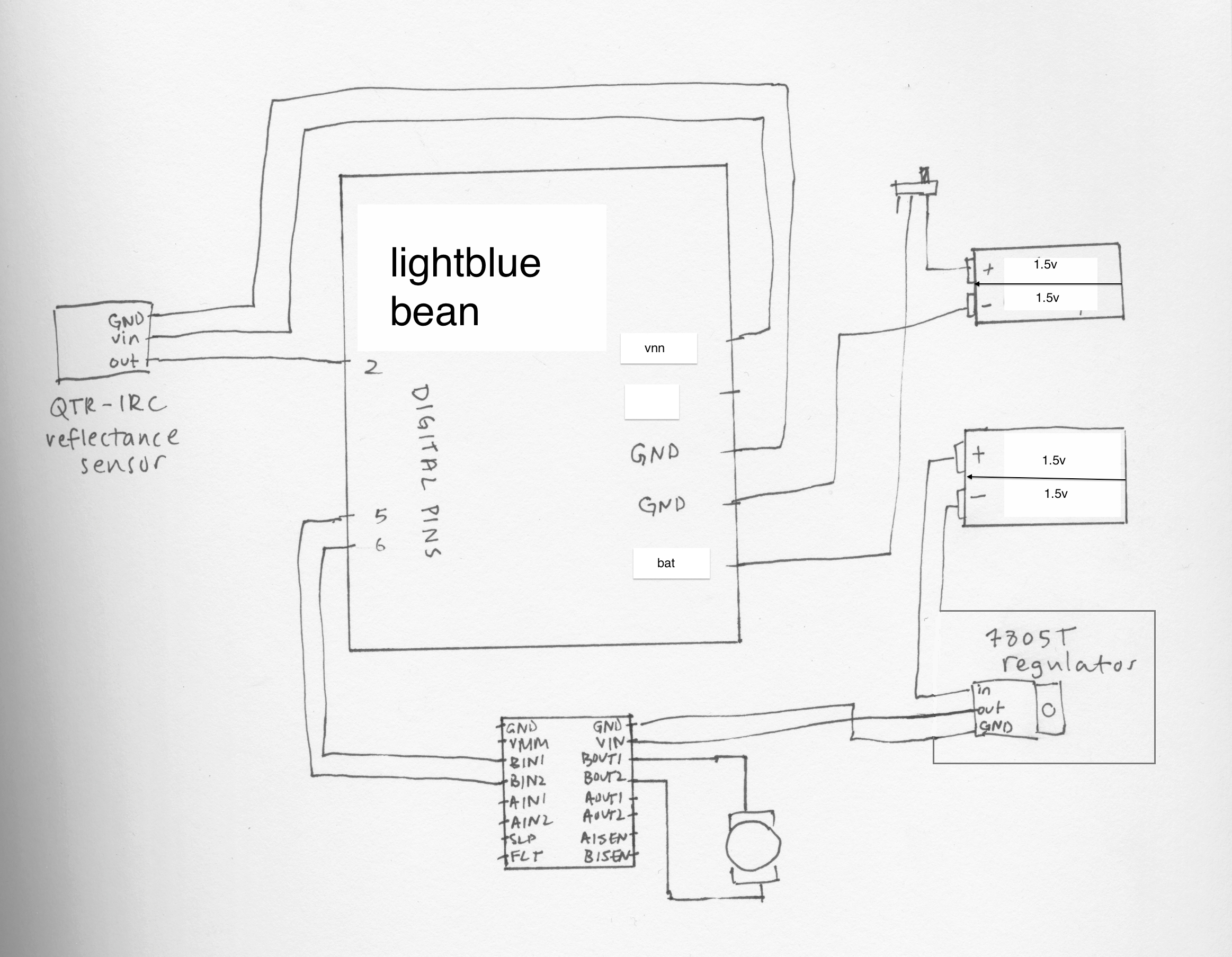
int MB1 = 6; // motor b pin 1
int MB2 = 5; // motor b pin 2
int sensor1 = 2; // change “0” to whatever pin to which you are hooking the sensor. Just this one change allows you to test operation on other pins.
int reflectance;
int arc_size = 10 ////but this should come from pure data…10 is our small arc size, 100 could be our max?? this can all be set in in the pc.scale thing. where 10 is the second to last number and 100 is the last number
void setup() {
pinMode(MB1, OUTPUT);
pinMode(MB2, OUTPUT);
}
void loop() {
reflectance = 1; //initialize value to 1 at the beginning of each loop
pinMode(sensor1, OUTPUT); //set pin as output
digitalWrite(sensor1, HIGH); //set pin HIGH (5V)
delayMicroseconds(15); //charge capacitor for 15 microseconds
pinMode(sensor1, INPUT); //set pin as input
while((reflectance < 900) && (digitalRead(sensor1) != LOW)){ //timeout at 500
// read the pin state, increment counter until state = LOW
++ reflectance; // increment value to be displayed via serial port
// delayMicroseconds(4); //Change value or comment out to adjust value range
}
if (reflectance < 500){
Serial.println(reflectance);} //Send reflectance value to serial display
else {
Serial.println(“T.O.”); //if reflectance value is over 500 then it’s a “timeout”
}
delay(0);
Serial.begin(9600);
doForward(MB1, MB2); // motor B forward
delay(arc_size);
doStop(MB1, MB2);
delay(0);
if (reflectance > 200) {
doBackward(MB1, MB2); //motor B backward
delay(arc_size);
doStop(MB1, MB2);
delay(0);
}
}
void doForward(int pin1, int pin2) {
digitalWrite(pin2, LOW);
digitalWrite(pin1, HIGH);
}
void doStop(int pin1, int pin2) {
digitalWrite(pin2, LOW);
digitalWrite(pin1, LOW);
}
void doBackward(int pin1, int pin2) {
digitalWrite(pin2, HIGH);
digitalWrite(pin1, LOW);
}
|
