Autonomous Robot Part 3 – High-Five Bots
|
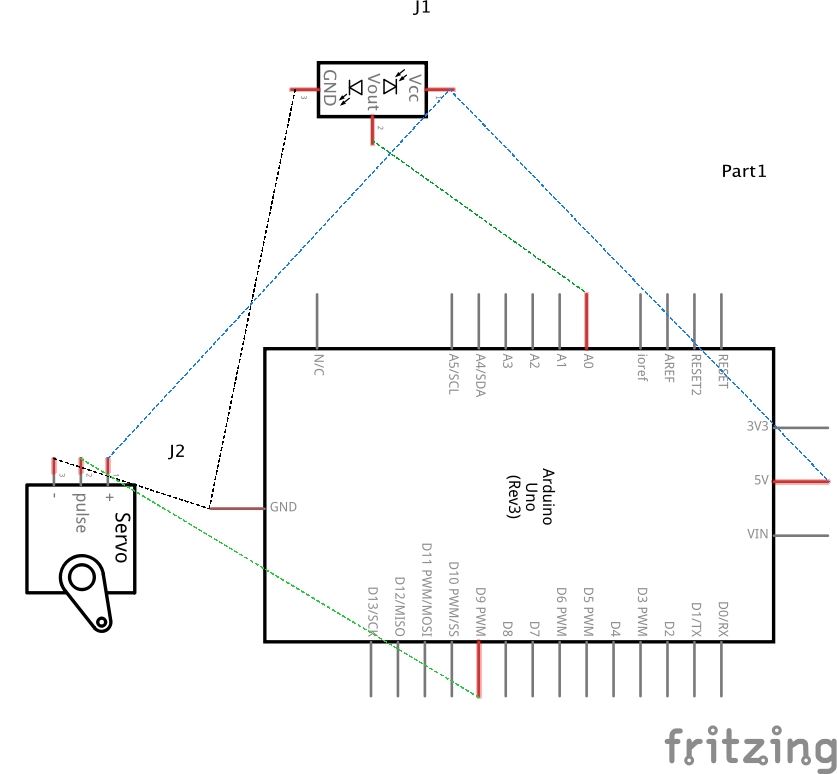
The Team Kaitlin Schaer, Rachel Ciavarella Introduction In our exploration of robot autonomy, we wished to create two simple robots that could engage in basic conversation with one another. We chose to do this through the motion of the high-five. Though the motion is simple and highly constrained, we were excited to view the variety of interactions that came about between the two robots, as the motion was often unexpected and humorous. Video Technical Notes Circuit Diagram
Arduino Code Our code is a simple one-in, one-out from the IR proximity sensor data to the servo position. We constrained the sensor values to a manageable range, added a delay to smooth the values, and mapped them to a range of positions on the servo. The servo points chosen were experimentally determined to best suit the kind of high-five gestures we were after. Also written into the code is the “autonomy” of the high-five bots: in the loop, we randomly initiate the command to either send the servo to the forward, or reverse position. This allows the robots to initiate or reject contact with one another. working_randomness_retract_uno.ino
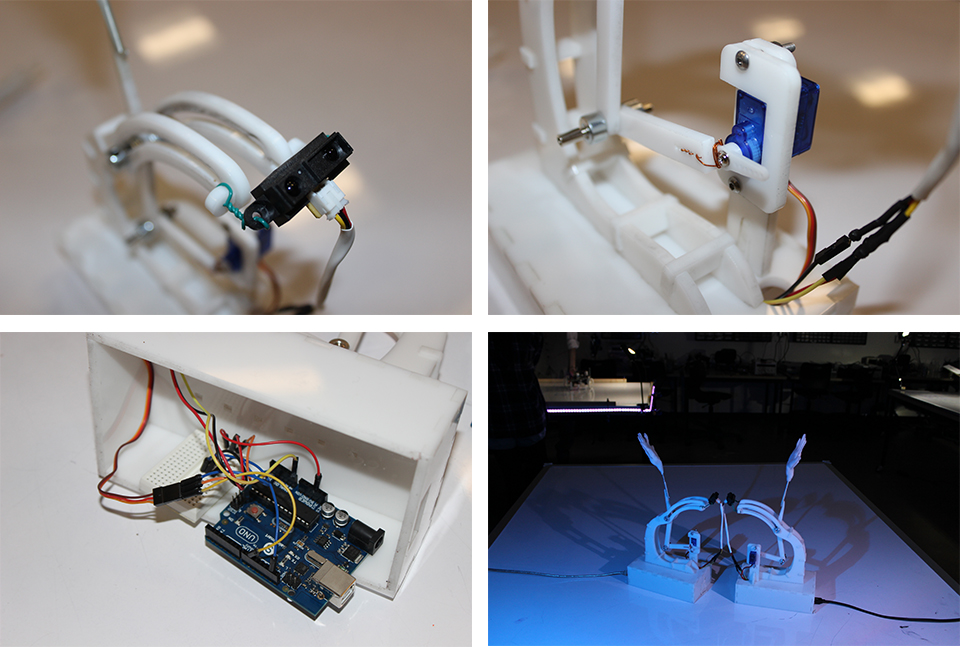
Additional Photos
|