
Posts Tagged 'F14'

Autonomous Robot Part 3 – High-Five Bots
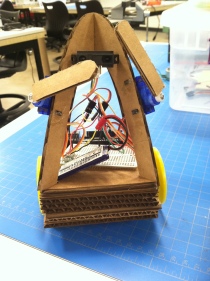
The Team Kaitlin Schaer, Rachel Ciavarella Introduction In our exploration of robot autonomy, we wished to create two simple robots that could engage in basic conversation with one another. We chose to do this through the motion of the high-five.
Autonomous Robot Part 3 – High-Five Bots
The Team Kaitlin Schaer, Rachel Ciavarella Introduction In our exploration of robot autonomy, we wished to create two simple robots that could engage in basic conversation with one another. We chose to do this through the motion of the high-five.
How to charge LiPo battery with Team Tenergy
1. Connect “Power” and “Balance” to corresponding ports; it would be something like this: 2. Power on Team Tenergy charger station; hit Esc (the leftmost button) coming to the top menu. Choose “LiPo BATT” for PROGRAM SELECT. The screen should show
How to charge LiPo battery with Team Tenergy
1. Connect “Power” and “Balance” to corresponding ports; it would be something like this: 2. Power on Team Tenergy charger station; hit Esc (the leftmost button) coming to the top menu. Choose “LiPo BATT” for PROGRAM SELECT. The screen should show
Autonomous Robot Part 2 – Boo! Ghosty Autonomous Robot
Annamarie Rose, Wole Idowu, Nkinde Ambalo Description: Ghosty is an autonomous little robot who is adventurous and loves to explore his surrounds. However, unlike a normal ghost, he doesn’t like to scare people. Instead they actually scare him! His vision
Autonomous Robot Part 2 – Boo! Ghosty Autonomous Robot
Annamarie Rose, Wole Idowu, Nkinde Ambalo Description: Ghosty is an autonomous little robot who is adventurous and loves to explore his surrounds. However, unlike a normal ghost, he doesn’t like to scare people. Instead they actually scare him! His vision
Get your RPI connecting CMU-SECURE WIFI
At the request of the Carnegie Mellon University Information Security Office (ISO), the prior contents of this page were redacted on 2017-08-11 by IDeATe technical staff. As a reminder, CMU Computing Policy requires maintaining the confidentiality of your Andrew account credentials. As such, it
Get your RPI connecting CMU-SECURE WIFI
At the request of the Carnegie Mellon University Information Security Office (ISO), the prior contents of this page were redacted on 2017-08-11 by IDeATe technical staff. As a reminder, CMU Computing Policy requires maintaining the confidentiality of your Andrew account credentials. As such, it
Day Twenty-Three
Agenda quick poll of interest in other specific IDeATe courses: HMV, PhysComp Studio, Experiential Media would HMV potentially be better at Tue-Thu 10:00-11:20 (no promises)? Ideation Assignment finite-state machine introduction cleanup! Details: The new finite-state machine exercises are now in
Day Twenty-Three
Agenda quick poll of interest in other specific IDeATe courses: HMV, PhysComp Studio, Experiential Media would HMV potentially be better at Tue-Thu 10:00-11:20 (no promises)? Ideation Assignment finite-state machine introduction cleanup! Details: The new finite-state machine exercises are now in
Helpful Tutorial [OSX + TouchOSC]
I’ve found that Android doesn’t play nice with ad hoc networks created from OSX. Here is a blog post that outlines a clever workaround using AirDroid.
Helpful Tutorial [OSX + TouchOSC]
I’ve found that Android doesn’t play nice with ad hoc networks created from OSX. Here is a blog post that outlines a clever workaround using AirDroid.

Autonomous Robot Part 2 – Drawingbot
Group Members: Aditi Sarkar, Alice Borie, Claire Hentschker Designer: Aditi Sarkar, Integrator: Claire Hentschker, Tutor and Scribe: Alice Borie Introduction We wanted to create an autonomous drawing robot that altered its drawing in response to lines it had already created.
Autonomous Robot Part 2 – Drawingbot
Group Members: Aditi Sarkar, Alice Borie, Claire Hentschker Designer: Aditi Sarkar, Integrator: Claire Hentschker, Tutor and Scribe: Alice Borie Introduction We wanted to create an autonomous drawing robot that altered its drawing in response to lines it had already created.
Autonomous Robot Part 2 – Bubble Machine Robot
Team Members: Integrator/Designer: Lauren Valley Documentation/Scribe: Maggie Burke This (2nd) Prototype: The Bubble Machine Robot is an autonomous robot that blows bubbles at five different targets arrayed in a semi-circle. The robot uses the feedback from the targets that it
Autonomous Robot Part 2 – Bubble Machine Robot
Team Members: Integrator/Designer: Lauren Valley Documentation/Scribe: Maggie Burke This (2nd) Prototype: The Bubble Machine Robot is an autonomous robot that blows bubbles at five different targets arrayed in a semi-circle. The robot uses the feedback from the targets that it
Autonomous Robot Part 2 – Marco Robo
Marco Robo Team members: Ruben Markowitz, Bryan Gardiner, Sara Johnson Introduction We are creating an automous robot that explores its surroundings, and maps its journey in attempt to understand its place in the world. Marco Robo travels until it encounters
Autonomous Robot Part 2 – Marco Robo
Marco Robo Team members: Ruben Markowitz, Bryan Gardiner, Sara Johnson Introduction We are creating an automous robot that explores its surroundings, and maps its journey in attempt to understand its place in the world. Marco Robo travels until it encounters

Autonomous Robot Part 2 – TicTok
Group Member: Horace Hou, Zac Mau Horace Hou, Zac Mau as Scribe, Designer, Integrator, Tutor, Introduction TicTok is a set of clocks which have their hands linked together by a conductive elastic. One of the clocks behave like a regular clock
Autonomous Robot Part 2 – TicTok
Group Member: Horace Hou, Zac Mau Horace Hou, Zac Mau as Scribe, Designer, Integrator, Tutor, Introduction TicTok is a set of clocks which have their hands linked together by a conductive elastic. One of the clocks behave like a regular clock