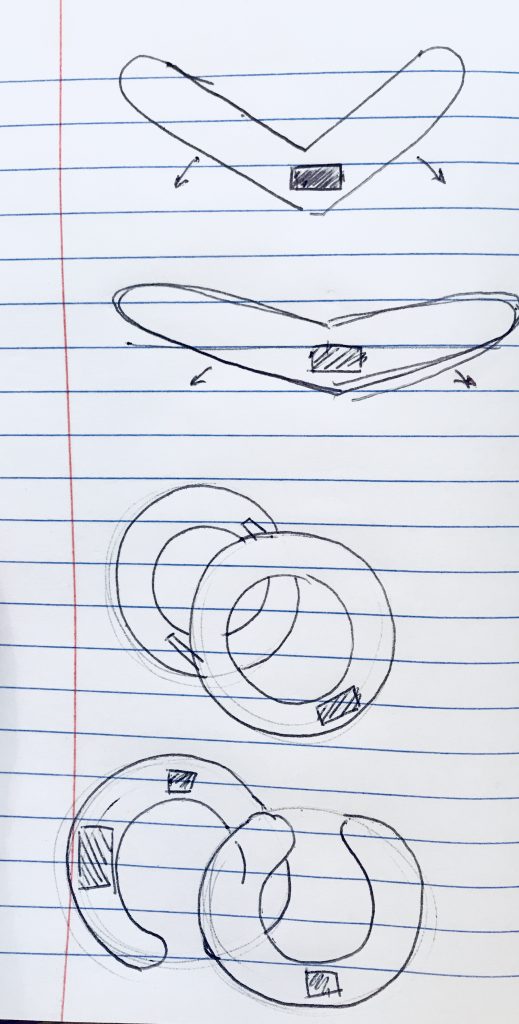
Brainstorming
Taking inspiration from the model our professor presented us in class, I thought about how I could create a teetering motion or further the rolling motion.
Making
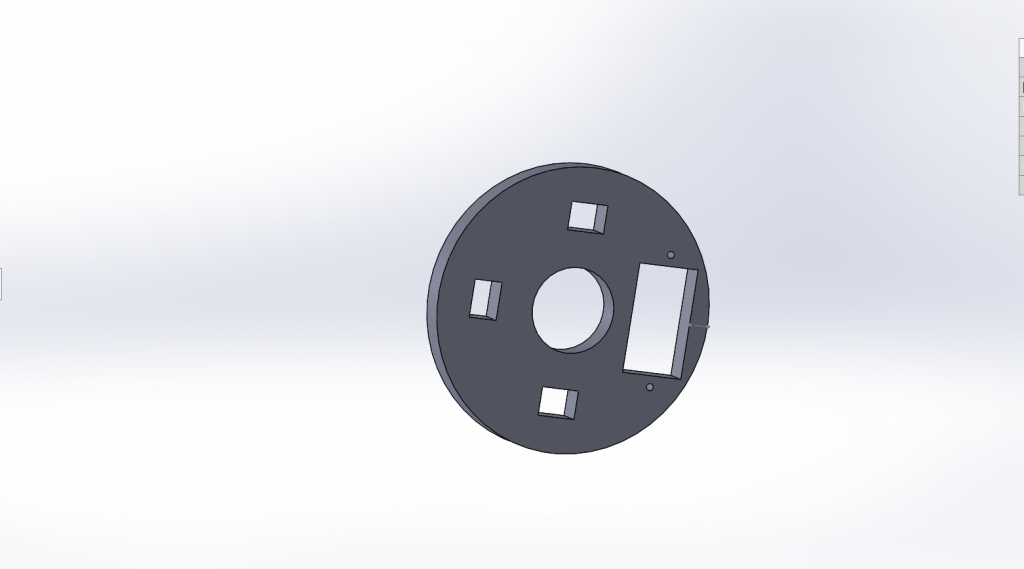
This was the circular SolidWorks model I created and when it printed out, I learned that the servo was too heavy to rotate a full 360 degrees and made a rocking motion instead.
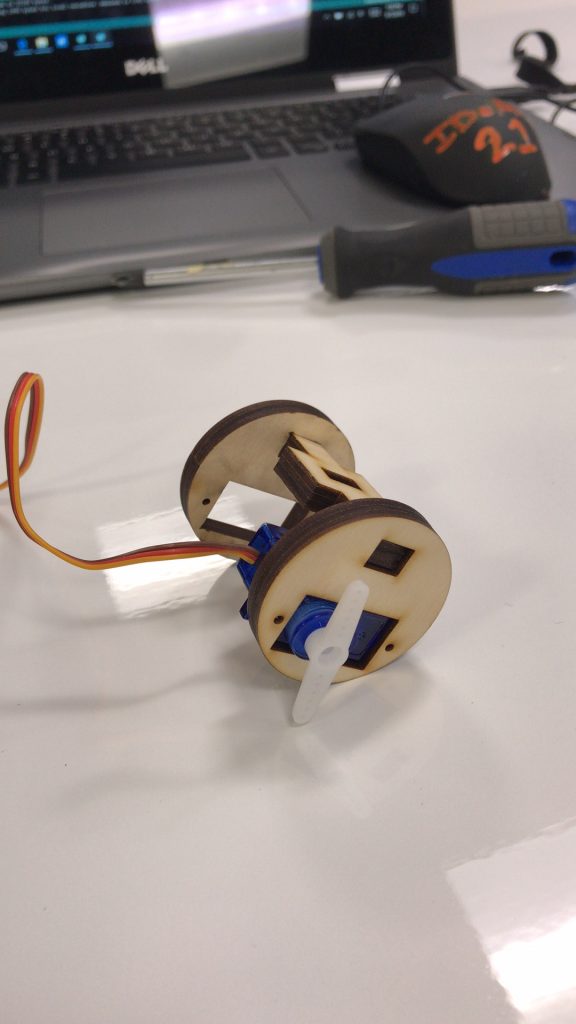
I played with the coding until the servo spun in a way that made the rolling more prominent. My professor also suggested me to add a weight opposite of the servo to allow it to gain more momentum and roll even more.
It looked something like this:
I thought that if the mechanism’s weight was to a minimum, then the servo horn could be powerful enough to rotate the entire body. However, that was not the case, and the weight was not centered enough to do this.
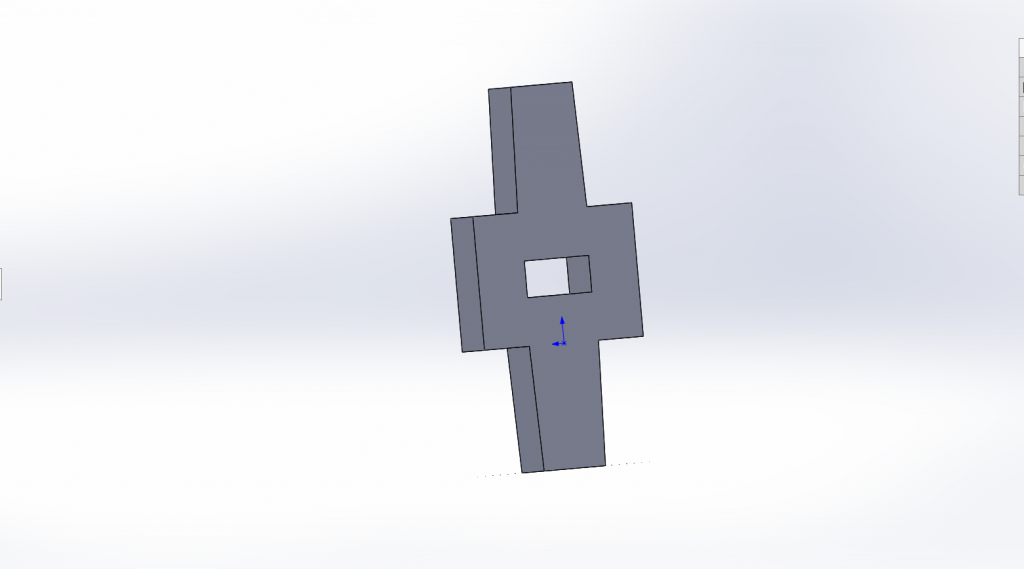
Sometimes the mechanism fell over in certain degrees, therefore, I extended the middle connecting part to add more stability. I realized I only needed one to connect the two circular pieces, and it decreased the weight, so in the end, I decided to only have one connecting part.
The Final Movement
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(9);
}
void loop() {
myservo.write(0);
delay(1800);
myservo.write(180);
delay(2000);
}
Leave a Reply
You must be logged in to post a comment.