When we came to this project, we began with some physical prototyping to understand the interaction between the two robots. In doing so, we landed on a pretty interesting hanging form that inspired the rest of our work.
We began with a simple two link arm that was controlled by the servo motors on the stand. This moved the third link in an interesting way and we were intrigued as to how we could introduce conflict in the duo.
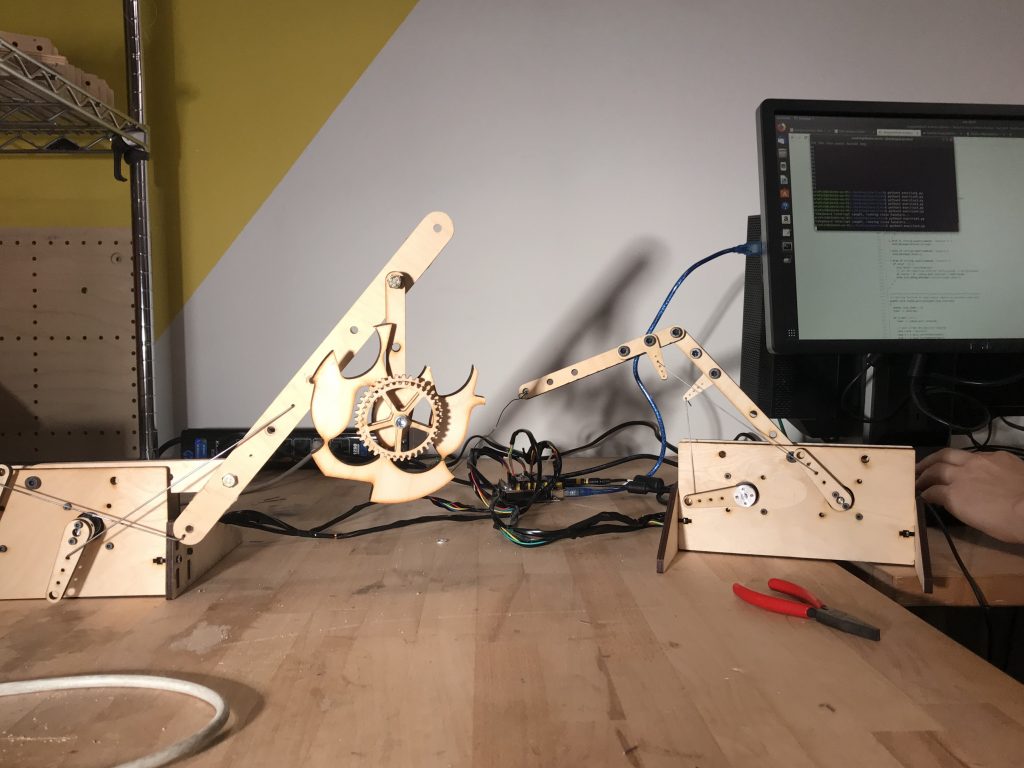
We found these ranges for certain reactions: one being a low tug between the two arms and the other a higher, more forceful tug. In the end, the robots eventually overpower each other and one or the other snaps the piano wire off. This can happen on loop as the winner differs each time we’ve run the whole program.
Comments are closed.