The Dissatisfied Artist
by Kate and Doris
Project Introduction:
The initial project description read as follows:
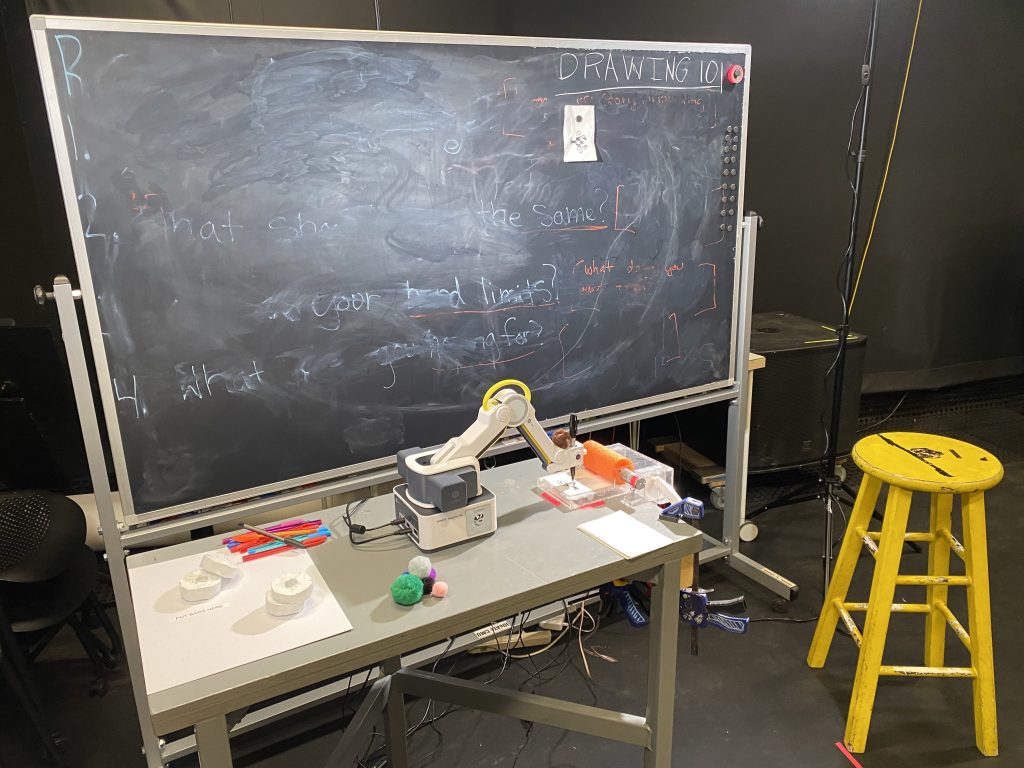
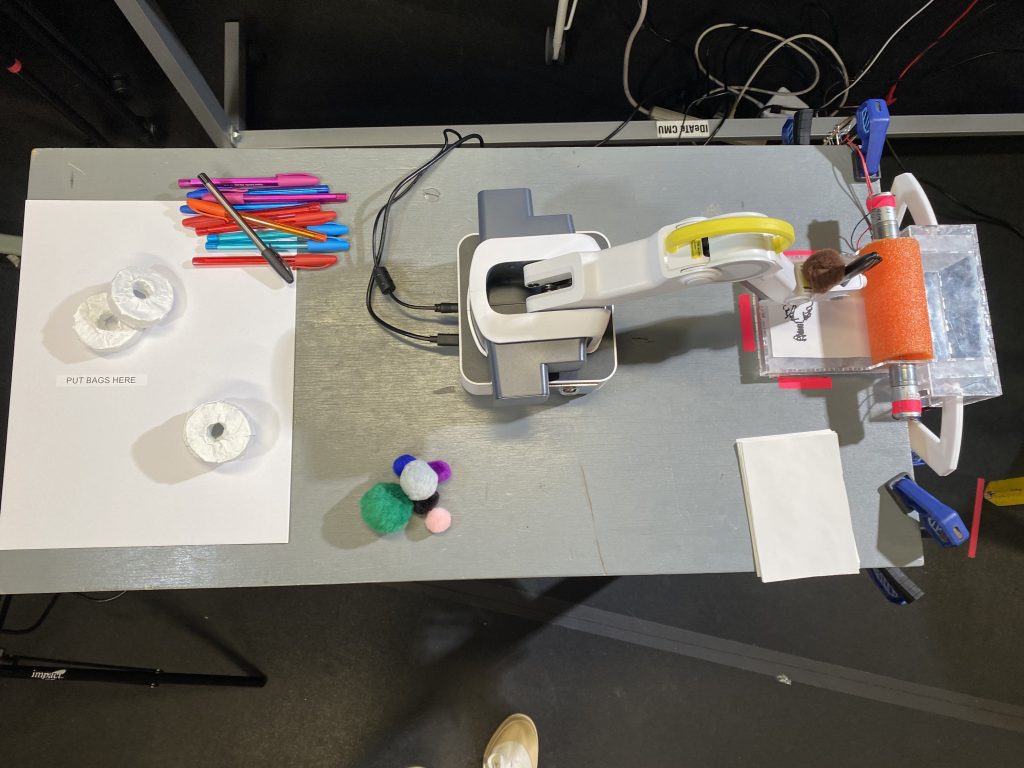
The overall idea is to create a drawing robot that makes drawings then crumples up the drawing after being unsatisfied with the resulting drawing. There would be a human performer element to the piece where the human performer walks up to the robot, un-crumples the drawings, and then displays them as “awesome robot art” and replaces the paper for the robot to try again. (trying to be supportive of the robot) The actual drawings will consist of a set order of drawings that create a narrative of the robot trying to draw better and eventually creating a drawing it doesn’t crumple up. The audience would be able to come up to the piece at any point in the process and see the existing list of drawings and the current drawing the robot is working on to get the idea of progress without having to see the whole performance. Of course, the final drawing the robot does not crush would only be visible to the people there at the end.
Reflection:
Drawing robots are nothing new or especially unique in any way, but when combined with a performer present and some added automated behaviors, the robot suddenly takes on more of a life of its own. The piece was entirely automated with pauses coded in to allow the human performer to interact with it and change the paper so it can draw the next thing. With enough work, the entire piece could have been automated to replace it’s own paper and get rid of the crushed paper, but a significant part of the narrative would be lost, as the focus of the piece is trying to create a “relatable robot” where observers could see a piece of themselves reflected in an automated robot.
How Things Changed:
For the most part, the show remained the same as what we initially intended, except we themed the entire show to be a “drawing class for robots” and the robot that is drawing was our student we were teaching.
Observations:
Kate:
The most interesting observations during the show were how people almost entirely gendered the robot as “he” during the show. There were a few people who used “she” but nobody referred to the robot as an “it” or “they.” I found this incredibly interesting as it not only shows that the audience related enough to the robot to refer to it as a person, but also because everyone seemed to assume it was a “he.” I am not entirely sure the reason this happened, but it was interesting to observe. Another observation I made is that the people who spend the most time observing the piece were most interested in trying to figure out what the robot was drawing almost like a game show where the drawing becomes more clear as time goes on. The other reaction to the piece was that people felt bad for the robot and related to the struggle of trying to make art and not being satisfied with the work. I also really enjoyed interacting with people “in-character” for the piece and giving away the robot’s drawings to people who wanted them.
Doris:
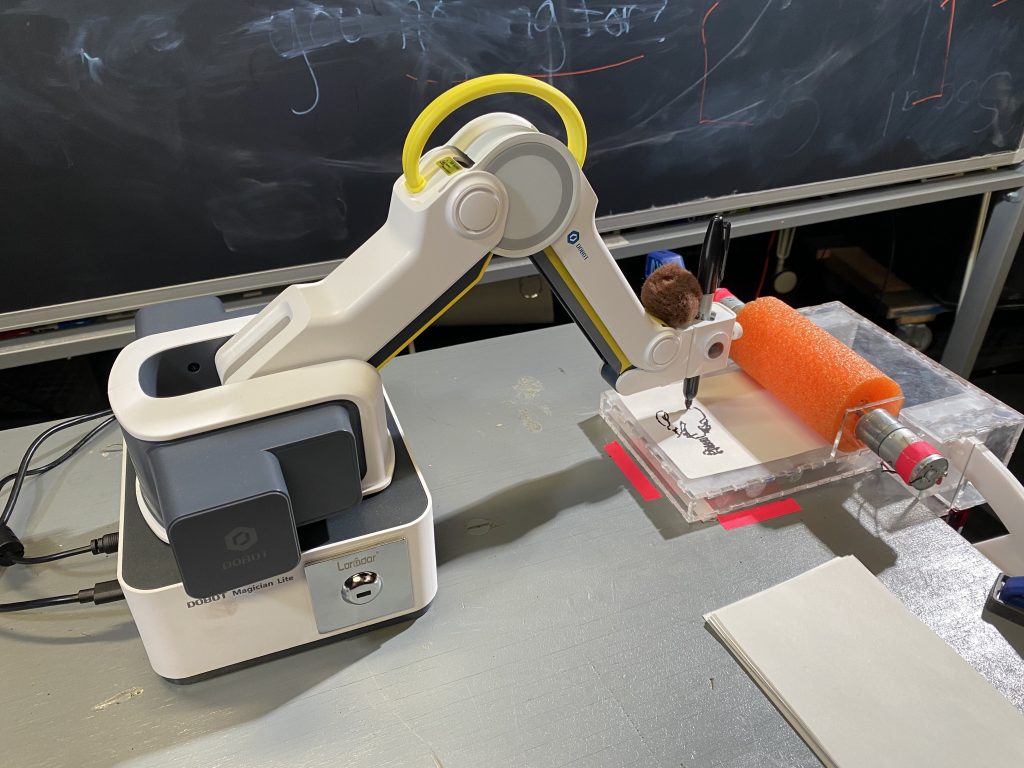
During the show I kind of thought of the robot as a very intelligent groundhog somehow. Maybe because of the brown hair ball and the very notable presence of teeth. I also feel like there’s also other opportunities of making it a directly-interactive-with-the-audience work – e.g. whenever the audience compliments the robot for its drawing, (one of the performers would control the robot and) the robot would be difficult and feel like its not good enough and crumple up the drawing; and then if the audience express something about the drawing being very slow or very meticulous, (the performer controlling the robot would decide that) the robot feels glad that effort is being noticed and would keep the drawing without crumpling it up.
Photos:
Video of Project:
Presentation:
https://docs.google.com/presentation/d/1NRUFueCWiSbjRdvitCi8xOdrFIdTJTflioAGe-L_EnY/edit#slide=id.p
Cad and Code:
Contributions:
We worked together as much as possible to develop the artistic aspects of the piece.
Kate: Python code for interpreting g-code for the robot arm to get it to draw and utilizing an already existing library to turn images into reasonable g-code, arduino code to run the motors at the correct times, and mechanical design of roller and enclosure for crushing mechanism.
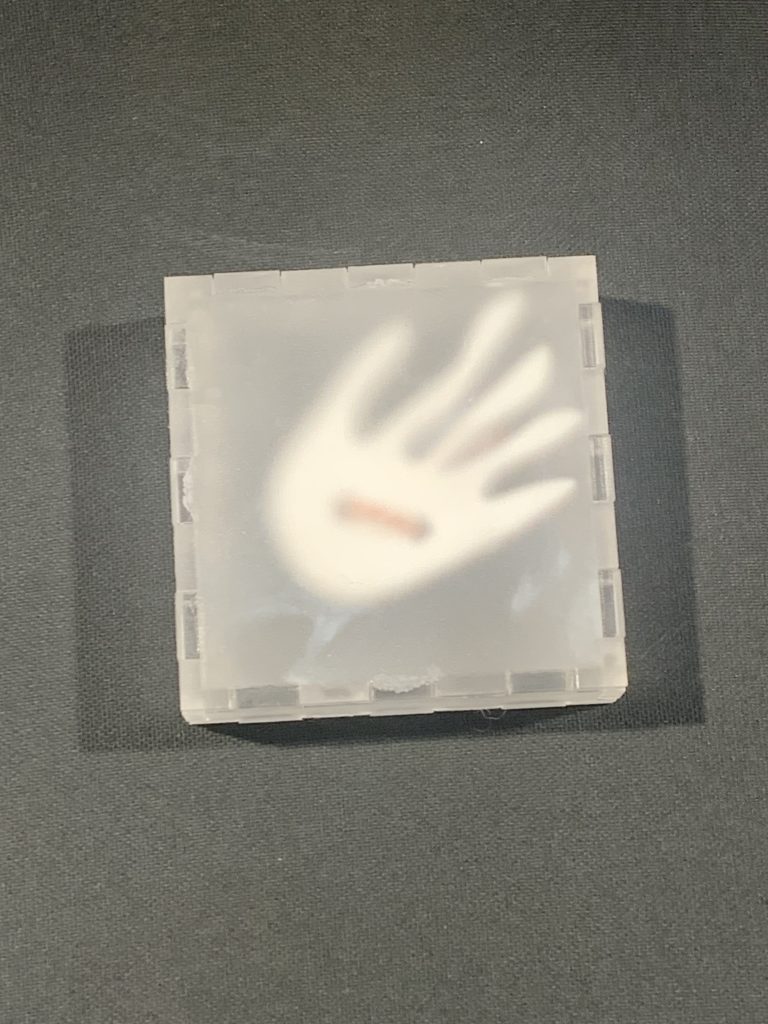
Doris: foraged for pool noodle; made crude sketches for the crushing mechanism; created dxf files using Solidworks for the crush arm and gears with helps from Kate; iterated designs for crush arm and hand, also added hand box for the crushing mechanism to be viable (in an easier way).