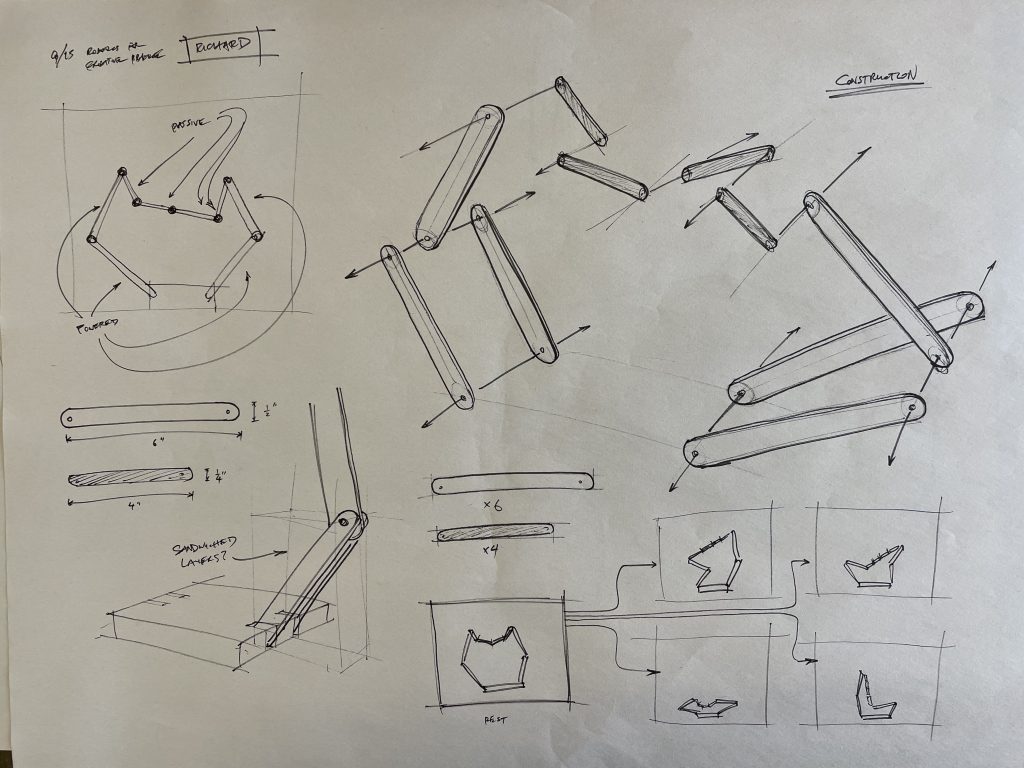
I wanted to create a machine that represented the idea of dealing with responsibilities and obligations in life. The two actuated arms are independent and can move on their own, but are held together loosely by a chain of unactuated links moving by themselves. The focus would lie on the chain itself, with only the rough form of the arms being visible.
In my sketch, I used a two-part arm system with a short chain, but playing around in Webots has inspired me to pivot to a more stocky arm shape with a much larger, more nimble chain. This new, more expressive form might help bring out some more unexpected behaviors from the two arms that I couldn’t have produced with a chain that only had 3 joints. However, I was having trouble both getting the motors to output torque as well as closing the kinematic loop.
The motion itself acts as a physical metaphor for our relationships with our obligations in life. As much as we are defined by our own traits, we are also characterized by the activities we take part in and the other responsibilities we take on, whether voluntarily or not. This piece focuses on that push and pull between how we want to define ourselves with how the rest of the world chooses to influence our character. Thus the robot would sometimes be harmonious and elegant while other times look like a mechanized tug of war being played by two opponents.