The concept for our project is a human performer sharing a meal with a robotic partner. As the performer interacts with different things on the table, the robot responds and also moves items on the table.
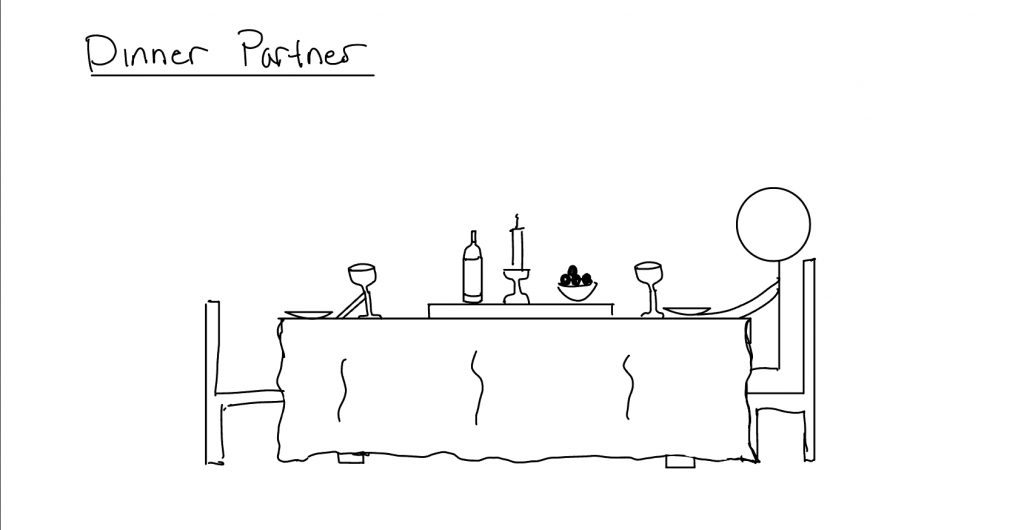
The table will have a false tabletop with holes, under which the electronics and mechanisms can be hidden. Foot pedals underneath the table could be used by the performer to control some of the robot’s movement.

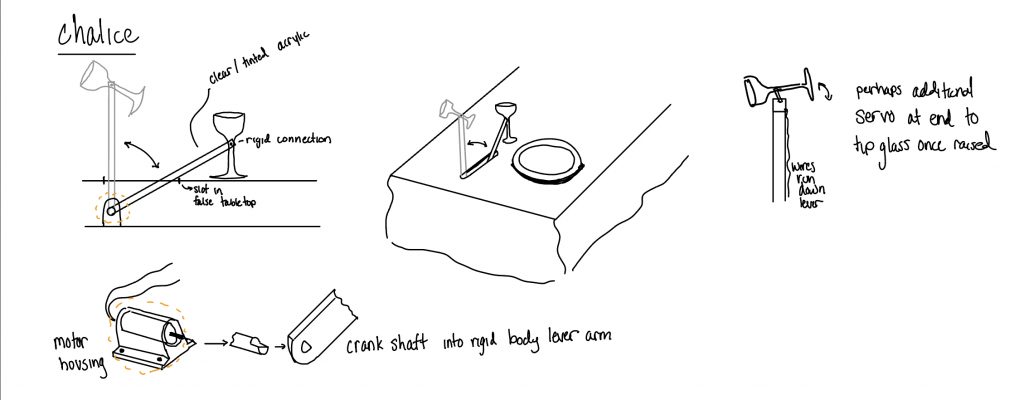
A chalice will be attached to a motor with a rigid lever arm, so that the robot can lift the chalice as if to take a drink. A servo could also be attached to the end of the arm to tip the chalice, to make the movement look more like someone taking a sip. The arm will be made of clear or tinted acrylic, to make it less visible.
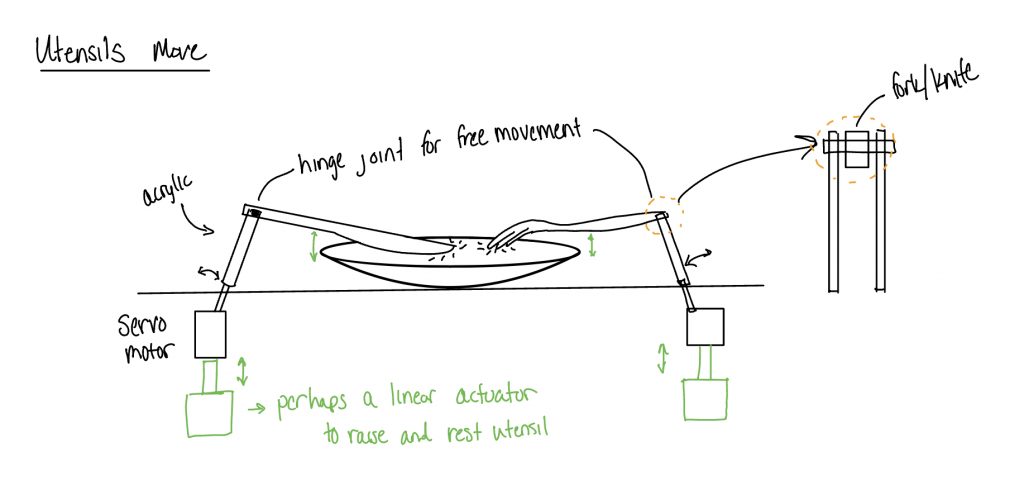
A fork and knife attached to servo motors will mimic cutting up food. The utensils will also use lever arms made of clear or tinted acrylic, and will be dragged across the plate by the servos.
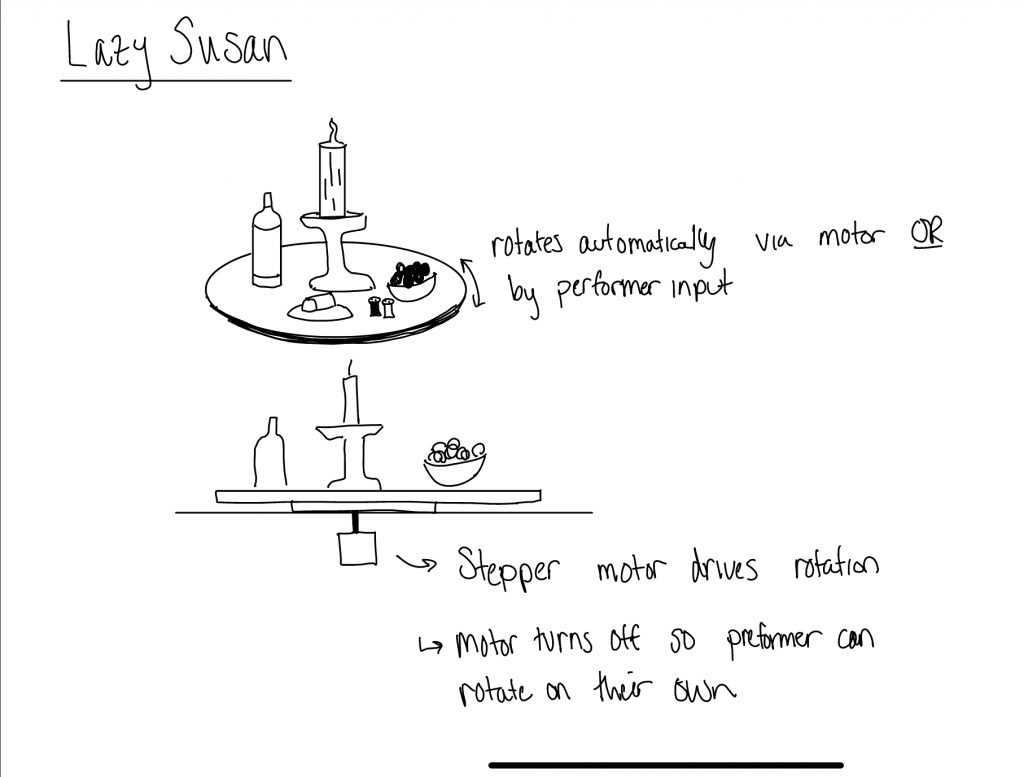
The robot can also spin a lazy suzan in the center of the table using a stepper motor. The lazy suzan will have different items on it, and the robot could turn it to “pass” an item to the performer. When not turning the lazy suzan, the motor will be off so that the human can also spin the lazy suzan.
As the performer interacts with different items on the table, the automated robot does the same to give the illusion of a ghost or imaginary friend. The artistic premise behind our performance is loneliness, and how we always need something to occupy us when we are alone, even if that is a ghost or an imaginary friend.
Besides the stepper/ stepper driver and servo motors mentioned above, we will be using an arduino uno and its corresponding software as a controller for our robot.