Exercise: Suitcase Test¶
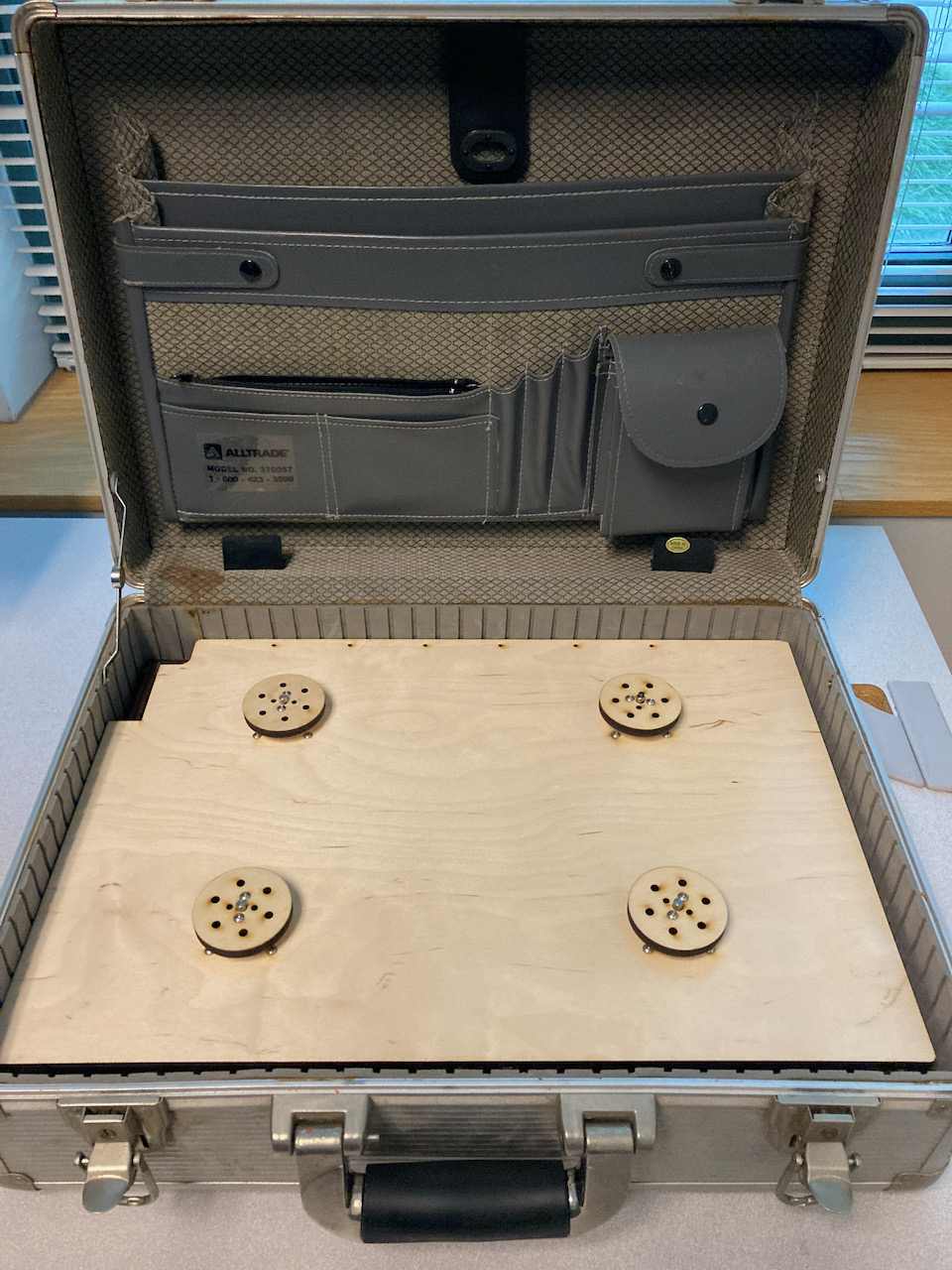
The suitcase testbed. The four interface discs are mounted on stepper motors. The power supply and Arduino CNC stepper driver are mounted below the deck.¶
For this exercise, students will work in pairs to simulate, build, and test a simple human-robot hybrid performance which takes place within the provided suitcase testbed. This includes developing the concept, fabricating any needed elements, and testing on the physical device. This shared platform provides four stepper motors mounted within an aluminum equipment case.
The chief objective is to explore the constraints and opportunities of physical sculpture within the context of hybrid human-robot performance. As starting points, you might consider some of the possible goals:
using dynamic interaction with moving objects to convey a sense of purpose
embracing randomness and chance movement as an expression of meaning
utilizing rhythmic or patterned movement to convey tempo and mood
creating expressive movements with a sense of individual identity
stimulating human empathy using movement
portraying a locus of attention via gesture and pose
illustrating a process of turn-taking
implying a dialogue or expressing a relationship
Objectives¶
After this exercise, you should be able to:
Formulate a creative inquiry as a robotic performance concept.
Resolve a performance concept into a kinetic sculpture system within formal constraints.
Fabricate and test kinetic sculpture.
Rehearse live performance and improvisation of the motions.
Resources¶
Testbed physical design: Suitcase Testbed
Stepper motor drive system: CNC Arduino Shield.
Arduino firmware: StepperWinch Arduino Sketch.
Python scripting examples: Suitcase Control Samples (Python).
Webots simulation model of physical testbed, although that is not the focus of this exercise: Suitcase Robot Model.
General Recommendations¶
The chosen objectives will need to consider the exploration within the limitations of physical hardware, including limited motion, precision, and speed, not to mention size and scale.
There are a variety of technical approaches; here are some starting points to contemplate:
setting up a manipulation area in which impellers interact with props
create a mechanism with additional freedoms, possibly counterweighted, to extend the basic movement dynamics
create counterbalance in which one mechanism pulls or pushes on another
use mirrors or gobos to create a visual representation in light and shadow which extends the movement
Creative Process¶
Each pair will test and document a performance on the physical testbed. This may include any or all of the following:
Fabricating manipulators or mechanical systems to attach to one or more motors temporarily.
Constructing scenery or a ground surface to install inside the case temporarily.
Fabricating or finding props to manipulate.
Porting the Webots simulator controller to control the Arduino in the testbed.
Please take good care not to damage or modify the equipment case, it is my own property and has some history.
Please keep in mind this is intended to be an exploratory exercise, not a polished show. Please focus on a single idea which will elucidate some potential for suitcase performance, then keep the fabrication to the minimum needed.
Deliverables¶
Each pair should post a brief report as a post on the RCP project site with the following:
A paragraph briefly describing your performance objectives and outcomes.
Photos of any fabricated hardware.
Short video clip (under one minute) of live performance.
Zip file including any CAD or design files and the final performance code.