A question that I’ve had throughout this course is how might we design an experience that presents a low barrier of entry to develop an understanding of soft robotics for younger audiences?
Earlier explorations of soft lego research and pneumatic interfaces within soft robotics literary search as well as design searches of how electronics/tech is taught to kids brought me to this concept.
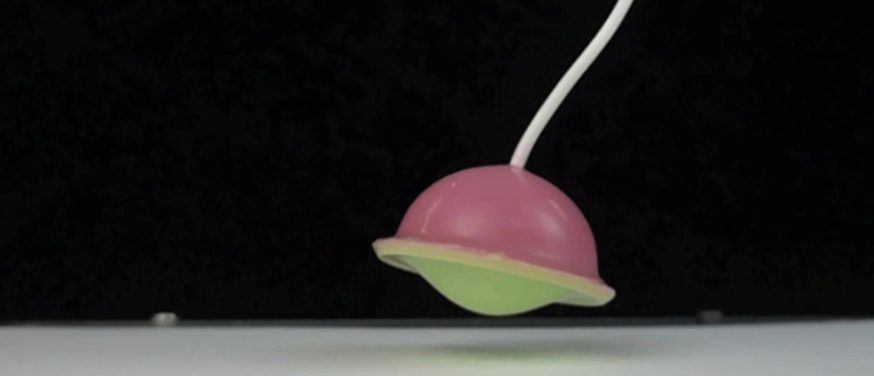
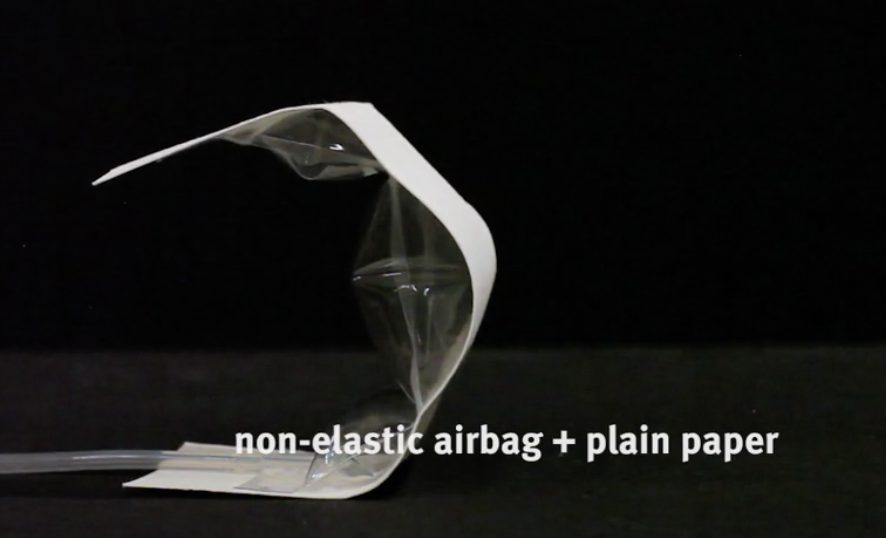
I present the idea of a kit that introduces various types of inflatable textures that can be pneumatically actuated or activated through a hand pump. Through research done in class, it seems like the variance of the form of various inflatable soft robotics is dependent on folding patterns and air pressure. The kit can then include various methods of folding the material to get a different kind of movement and interaction. The kit’s contents can potentially be connected to a series of air-tubes that the user can then assemble/disassemble to explore different configurations for the kit’s contents. This can serve as an introduction through a subsection (inflatable/pneumatic) of soft robotics.

Sources:
Robotics:
https://tangible.media.mit.edu/project/pneui/
Design:
https://www.dezeen.com/2018/07/18/saki-maruyamas-knotty-childrens-toy-royal-college-arts-graduate/
https://www.dezeen.com/2018/07/30/feeling-robot-cornell-university-texture-changing-skin-technology/