We are looking to create a building toy that helps young people learn basic principles of soft actuators. This building toy will likely consist of a kit of soft parts, loosely inspired by parts of the human body or other animals, actuated with a simple air pump. These parts will be compatible with an already established building toy, such as Lego or K’Nex, or a customizable figure toy, such as Potato Head. By adding soft actuated parts to these established toys, we intend to give children a basic grasp of how soft actuation works and how these mechanics can be applied in a creative setting.
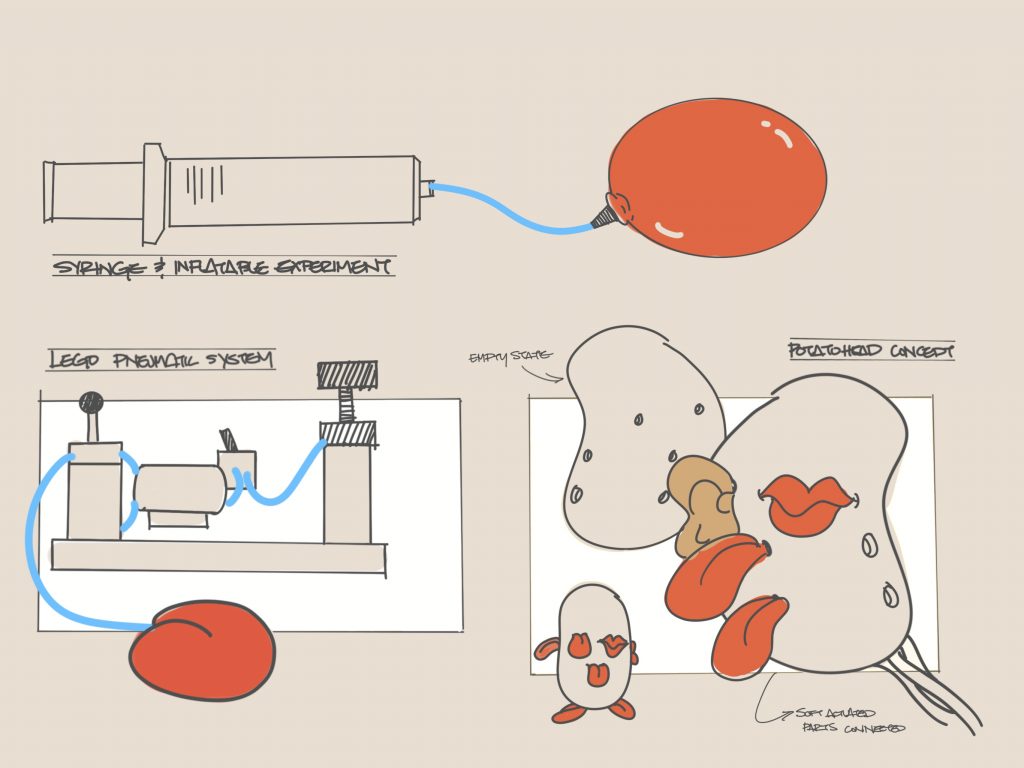
Regardless of what toy we make our parts interface with, we are planning to rely on a system of manual pumps and soft actuated parts connected by hoses to make the toys work. Because we intend to make the system modular, so actuated parts can unplug and plug into different hoses and pumps, we will need to design or adapt and test a system of interchangeable parts. We are going to prototype and test the efficiency of a rigid interface between a flexible hose and inflatable object. For this early test, since the focus is that interfacing part, we will probably just use a balloon for the inflatable piece and an off-the-shelf syringe and hose for the pump and hose. The interfacing part will be 3D printed, and the balloon will be attached to the interfacing piece with either glue, tape, or a rubber band. We will be designing this piece, and then analyzing its performance based on two factors: how efficiently it allows inflation, and how easy it is to attach and remove.
We’re looking at other pieces of art and design work that are specifically designed to interface with already existing building toys. One project we’ve considered is the Free Universal Construction Kit by Golan Levin and Shawn Sims (1). While the kit is addressing a different niche than we intend to study, it treads in similar water given its interaction with the system of an already established building toy.
On a technical level, we’re looking at a couple of places. First, we’re looking at projects that address the same space we’re looking at, such as the “Soft LEGO” project (2), which introduces inflatable Lego bricks. Our project aims to take this same concept and expand on it; rather than creating one brick that fits with a system, we are planning to create a set of different parts that can connect with a system and actuate in different ways. Second, we’re looking at different bio-inspired schemes for soft actuated movement. One example of the type of work in this vein is the soft robotic tongue (3), which we’re examining for the complex movement it achieves with a relatively simple actuation system.
Works Cited
- Golan Levin, Shawn Sims. Free Universal Construction Toy. 2012. url: http://fffff.at/free-universal-construction-kit/.
- Jun-Young Lee, Jaemin Eom, Woo-Young Choi, Kyu-Jin Cho. “Soft LEGO: Bottom-Up Design Platform for Soft Robotics.” 2018 IEEE/RSJ International Conference on Intelligent Robotics and Systems, Madrid, Spain, pages 7513-7520. 2018. doi: 10.1109/IROS.2018.8593546.
- X. Lu, W. Xu, X. Li. “A Soft Robotic Tongue–Mechatronic Design and Surface Reconstruction.” IEEE/ASME Transactions on Mechatronics, Volume 22, Issue 5, Pages 2102-2110. October 2017. doi: 10.1109/TMECH.2017.2748606.