This week we worked on iterations of the bistable connectors and the inflatable parts. We produced successful prototypes of both. Inflatables Given the holes resulting from bubbles in our last attempt at casting silicone inflatables, we worked on a redesigned mold. This new mold added a Lego-compatible connector and reoriented the molds to create a
Continue reading Elena and Sebastian 5-03 Update
Author: scarpent@andrew.cmu.edu
Elena and Sebastian 4/26 Update
This weekend we focused on casting in paraffin wax and in silicone, and created successful casts for both. Silicone We cast a prototype for the bistable connection. The cast came out nicely, but we still need to test it with the plastic nozzle to make sure it works properly. If it doesn’t we’ll need to
Continue reading Elena and Sebastian 4/26 Update
4/19 Sebastian and Elena
Internal Wax Components This week we acquired most of the materials we will need for the remainder of the project, including three new types to wax to experiment with– beeswax, paraffin wax, machinable wax. We also redesigned the mold for the wax components and are going to try to print and cast those molds this
Continue reading 4/19 Sebastian and Elena
Sebastian and Elena Project Update
Last week we began exploring with balloons test out using syringes to control inflatables and to experiment with the different types of movement we could achieve with the inflatable actuators. We were able to produce a couple different semi-functional devices: a two-balloon actuator that could change the angle of a piece of cardboard, a three-balloon
Continue reading Sebastian and Elena Project Update
Clarifying Research Scope | Elena and Sebastian
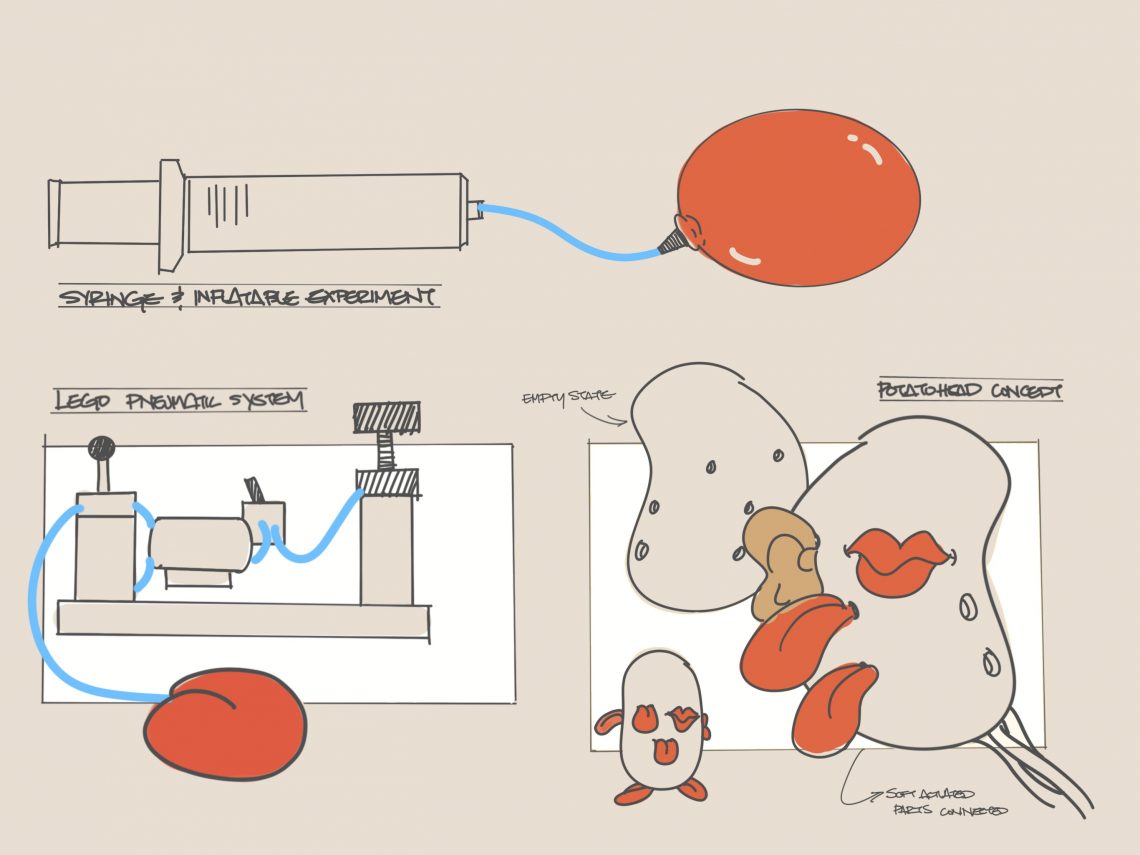
We are looking to create a building toy that helps young people learn basic principles of soft actuators. This building toy will likely consist of a kit of soft parts, loosely inspired by parts of the human body or other animals, actuated with a simple air pump. These parts will be compatible with an already
Continue reading Clarifying Research Scope | Elena and Sebastian
Research Part B
My project brief remains largely the same as before–to create a robot capable of licking lollipops in an eerily biomimetic manner, count those licks, and, before finishing the lollipop, biting the candy with a hidden jaw mechanism. The concept and background I discussed in the last post left a big technical hole: how to keep
Continue reading Research Part B
Research Study: Revisiting a Previous Project
Two years ago, with another student, I built a robot to lick lollipops. The robot functions, but I think more can be done with the concept; the piece consistently elicits references to the 1970 Tootsie Pop commercial (the one that posits the question about how many licks it takes…) from those I’ve shown it too,
Continue reading Research Study: Revisiting a Previous Project
Infusing Art with Technology
Hylozoic Soil (1) is a responsive installation piece by Philip Beesley. The work consists of a large, transparent structure suspended from the ceiling with fern-like fronds that respond to human presence. The movement of the leaves circulates air through the space, turning the piece into both a visual and a tactile experience. Like much of
Continue reading Infusing Art with Technology
Art and Design Inspiration
Ninety Six is an installation piece by Nils Völker that consists of 96 garbage bags, each with an independently controlled set of fans underneath. The bags inflate and deflate to create rhythmic patterns and undulations across the piece. From a distance, the piece starts to look like a single, living thing. The grid-like structure and
Continue reading Art and Design Inspiration
Assignment 4
D. Q. Nguyen, V. A. Ho. Kinematic Evaluation of a Series of Soft Actuators in Designing an Eel-inspired Robot. 2020 IEEE/SICE International Symposium on System Integration (SII). Pages 1288-1293. January 2020. doi: 10.1109/SII46433.2020.9025926. I have no conflicts of interest with regards to this paper or the research it discusses. I would identify myself as having
Continue reading Assignment 4