Inflatables
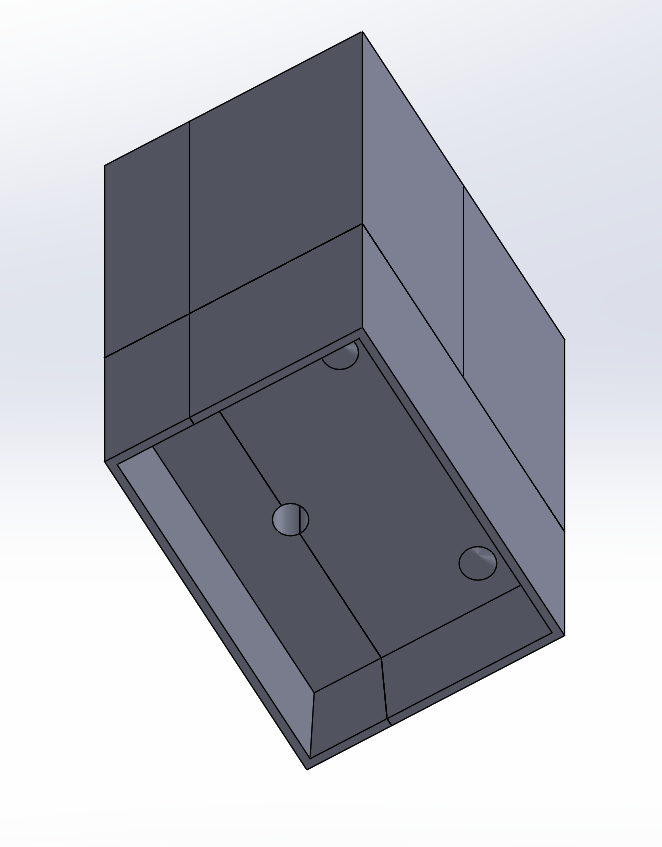
Given the holes resulting from bubbles in our last attempt at casting silicone inflatables, we worked on a redesigned mold. This new mold added a Lego-compatible connector and reoriented the molds to create a larger area to pour the silicone. We made casts in both molds, but the mold with the open flat side proved to be the most successful.
Bistable Connectors
We found that the thinnest lip of 1.1 mm was the most successful, producing a successful and repeatable invert upon part-insertion.

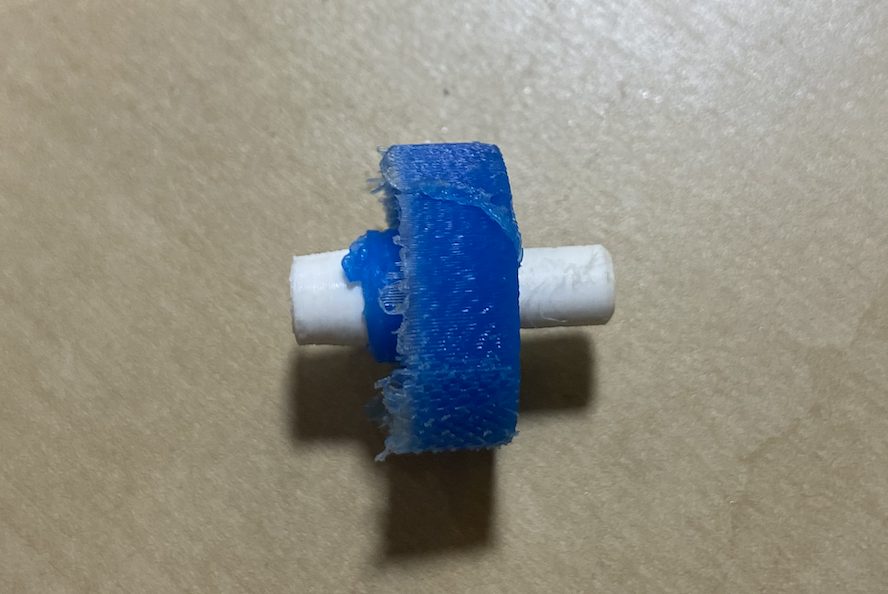

Silicone
We cast a prototype for the bistable connection. The cast came out nicely, but we still need to test it with the plastic nozzle to make sure it works properly. If it doesn’t we’ll need to assess whether the issue is a result of the design of the silicone component, the plastic bit, or both.
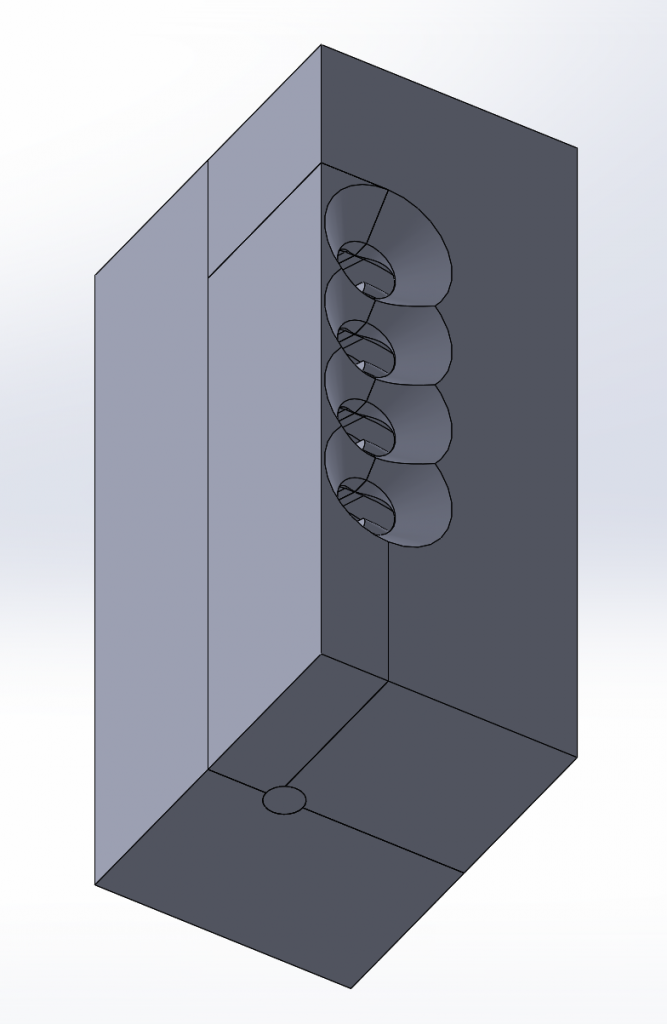
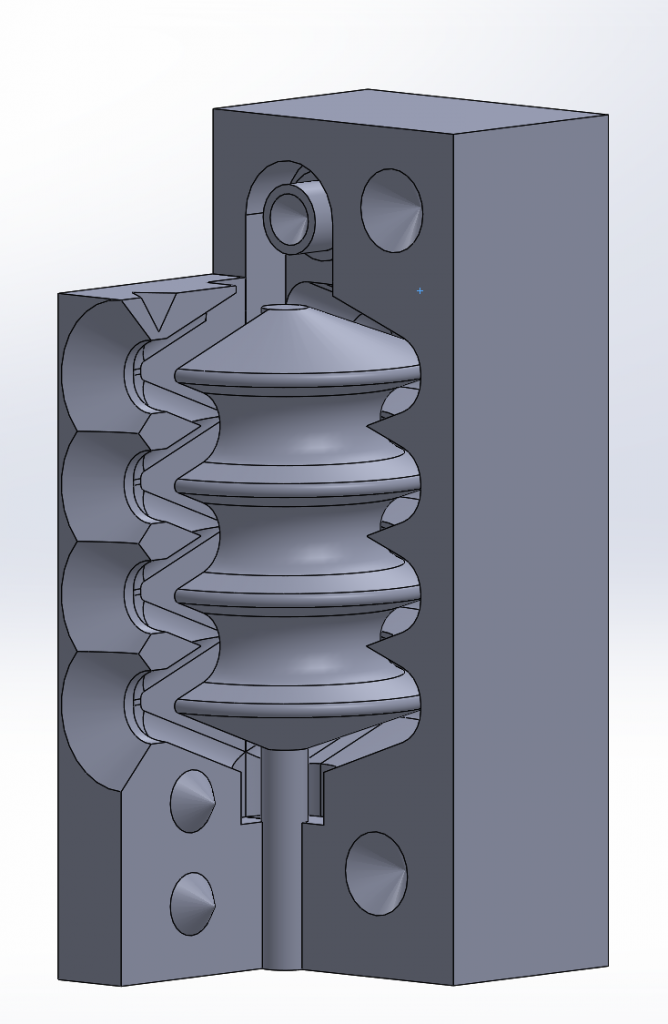
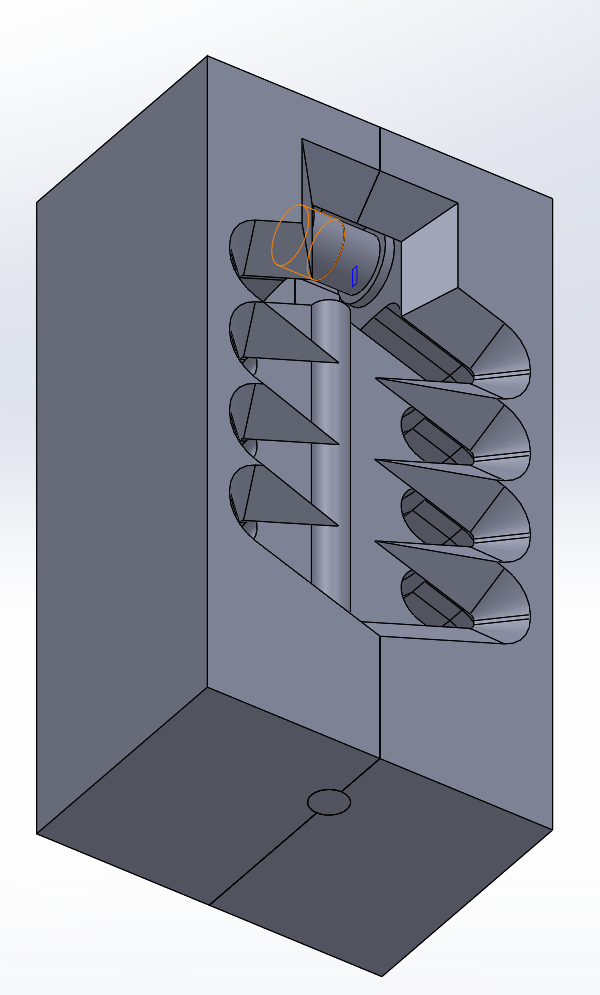
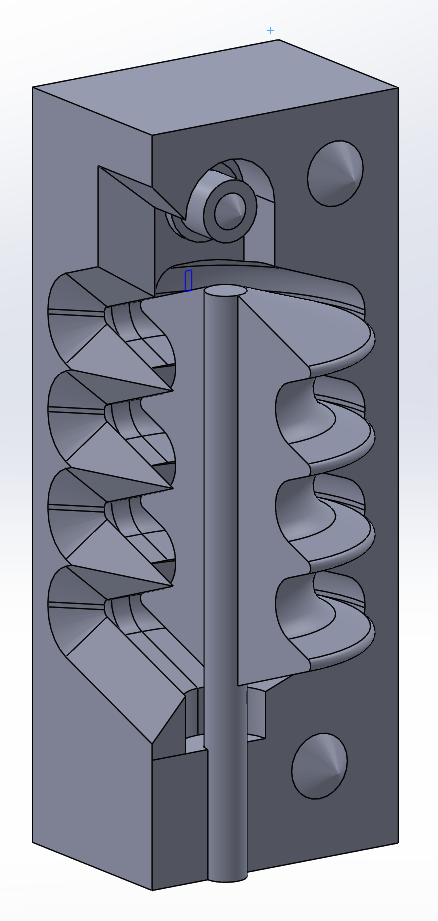
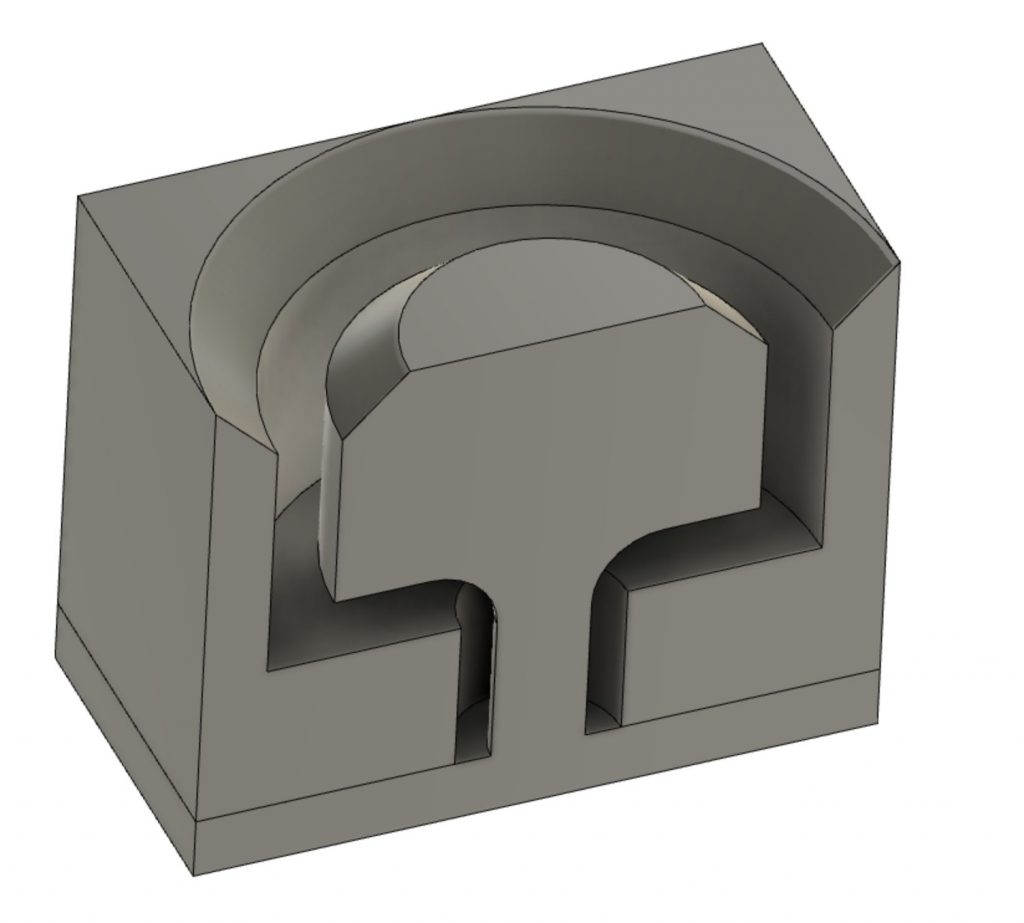
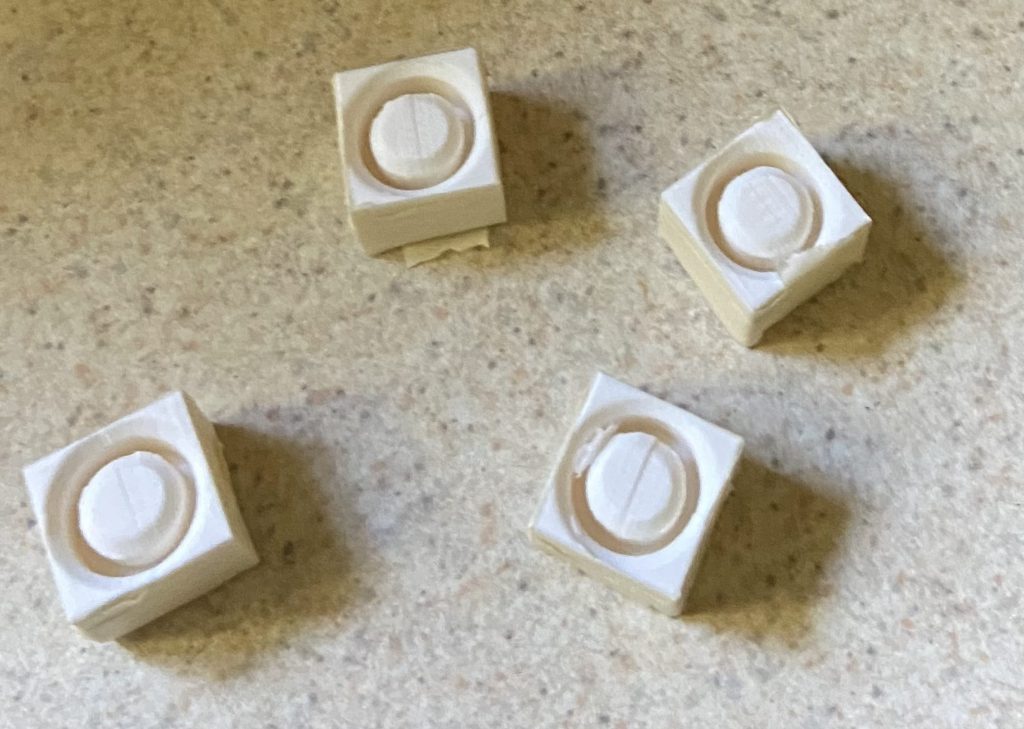
Wax
We cast the internal pieces of one of our inflatable components from paraffin wax. After a bit of experimentation, we produced a successful cast of high enough quality that we can use it for a silicone mold.
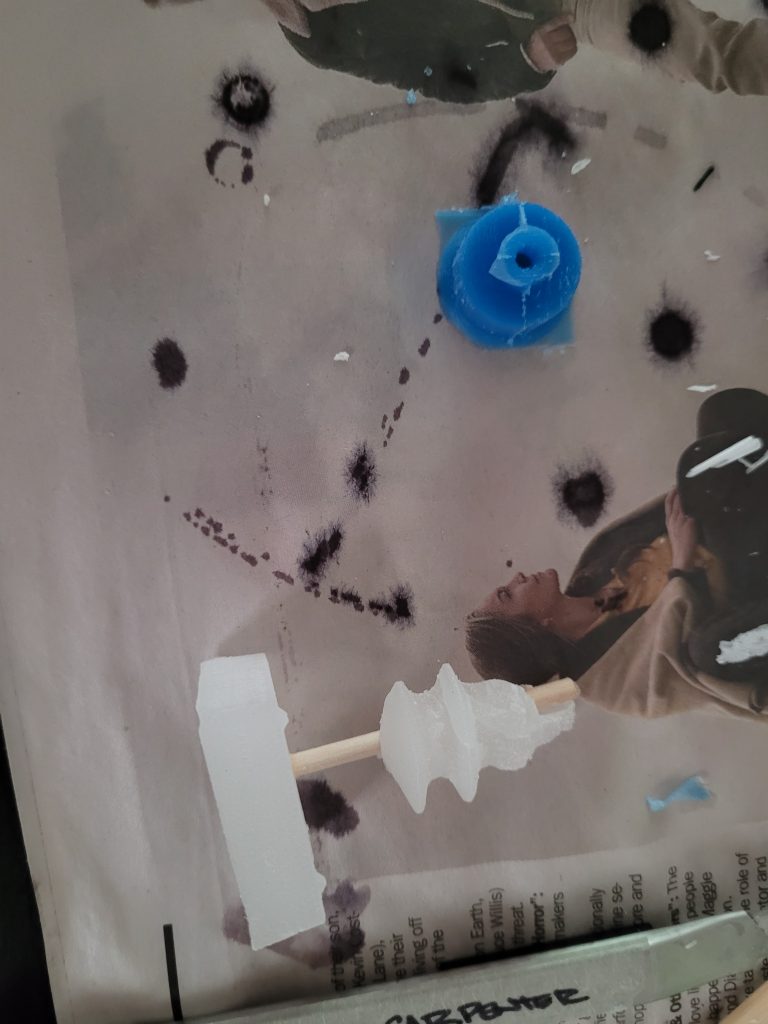
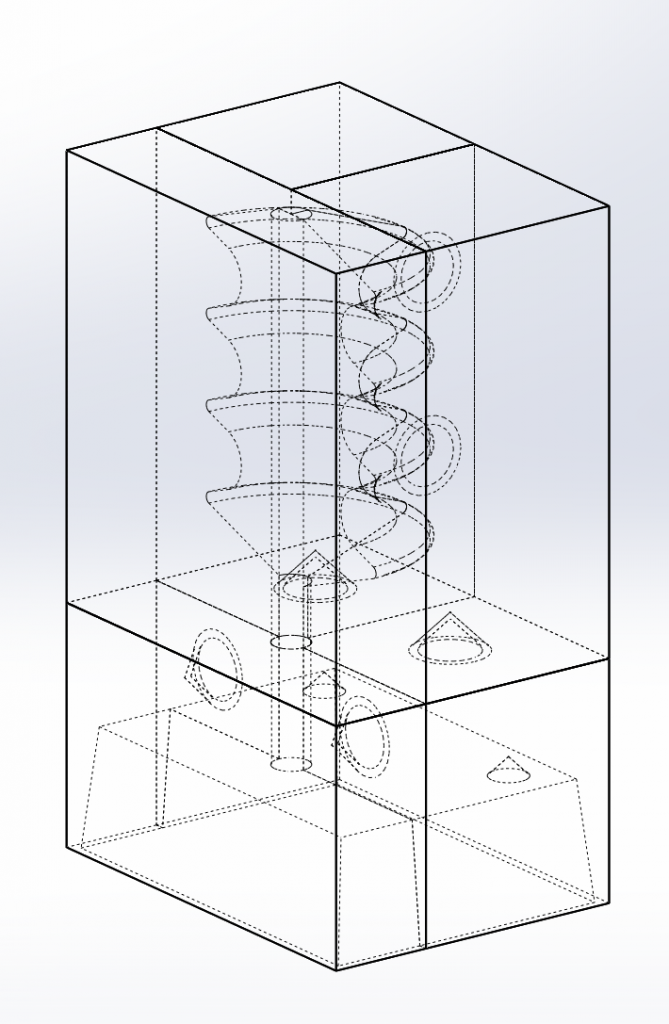
This cast was produced in two parts, a base piece and an auxiliary piece, connected to each other by an 1/8in dowel. The base piece cast beautifully on the first attempt. Our first attempt of the other part failed the first try, as some bits of the piece’s geometry broke off when we removed it from the mold. In our second attempt, we coated the plastic mold in a release agent before pouring the wax. With the release agent, we were able to easily separate the wax cast from the mold after hardening. We will attempt to use this wax piece to make a silicone cast this week.
]]>This week we acquired most of the materials we will need for the remainder of the project, including three new types to wax to experiment with– beeswax, paraffin wax, machinable wax. We also redesigned the mold for the wax components and are going to try to print and cast those molds this coming week. This new mold breaks into several pieces, an attempt to lower the surface area of contact that any particular piece of plastic has with the wax. We also introduced draft angles into some parts of the mold, something else in an attempt to break the wax away from the mold more successfully.
Bistable Connection
Additionally, the silicone piece of the bistable connection is on hold at the moment as we await print. It was our attention to finish the first test this weekend, but without a mold to cast in we weren’t able to do that. We hope to finish that up over the coming week.
]]>
This week we upgraded the size of our syringe to 100ml, and experimented with medical pumps. The former, expectedly, produced a much larger result in the balloon, although the result was still slightly underwhelming. Perhaps moving down to a Lego scale, rather than focusing so heavily on a vague balloon scale, might make these syringes seem more impressive. The heart pumps provided an interesting tradeoff: while we were able to fill up balloons with an indefinite amount of air, filling the balloon required more time an effort, and deflating the balloon was a rough, hard to control process. The syringes appeared to be the superior option given the amount of control we can achieve both while inflating and deflating the balloon.
We tried to replicated a couple of our explorations from last week with the larger balloon, particularly the three-balloon platform. This new prototype was actually considerably less successful than the smaller one, and we concluded this was likely due to a combination of three issues:
- Inflating the balloons with more air means the balloons get wider, pushing them further apart. This created stress that caused the balloons to break away from the tape.
- To compensate for the small capacity of the 20ml syringes, we tied all the balloons so that they could fill only to half capacity. This knot produced a loose, easily movable section at the top, which was attached to the platform. Without these tied off sections, the balloons attached to the larger syringe might have had a harder time sticking to the tape.
- Lastly, we used a different type of tape. The tape we used this time might have had an adhesive less adherent to latex.

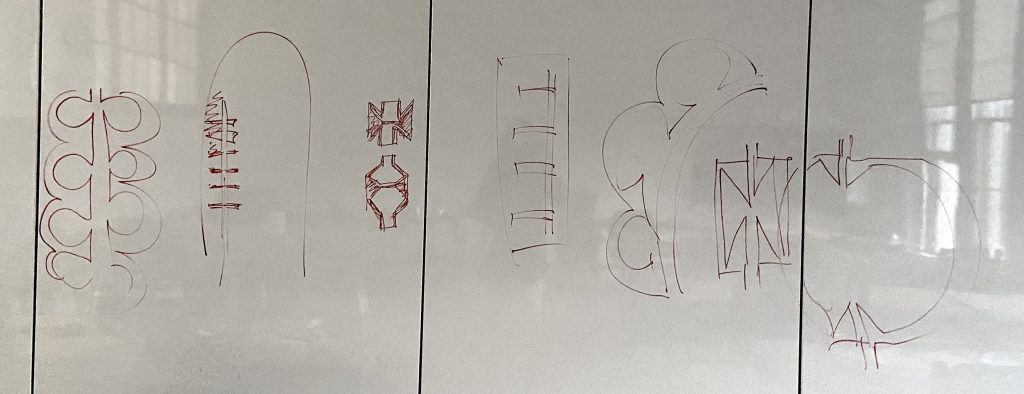
This weekend, we also discussed some rough designs for our inflatable silicone pieces. We concluded that we wanted at least three different types of motion: increasing in length, increasing in width, and one that bends to one side when inflated. This would employ three different soft designs to accomplish these three objects, and some sort of clear design language to communicate the motion of each piece. There is obvious potential to increase to even more kinds of movement, but it seems that a couple simple motions would be a good place to start as we figure out the workflow of creating these objects and also develop the interfaces that allows these actuators to integrate with the Lego System.
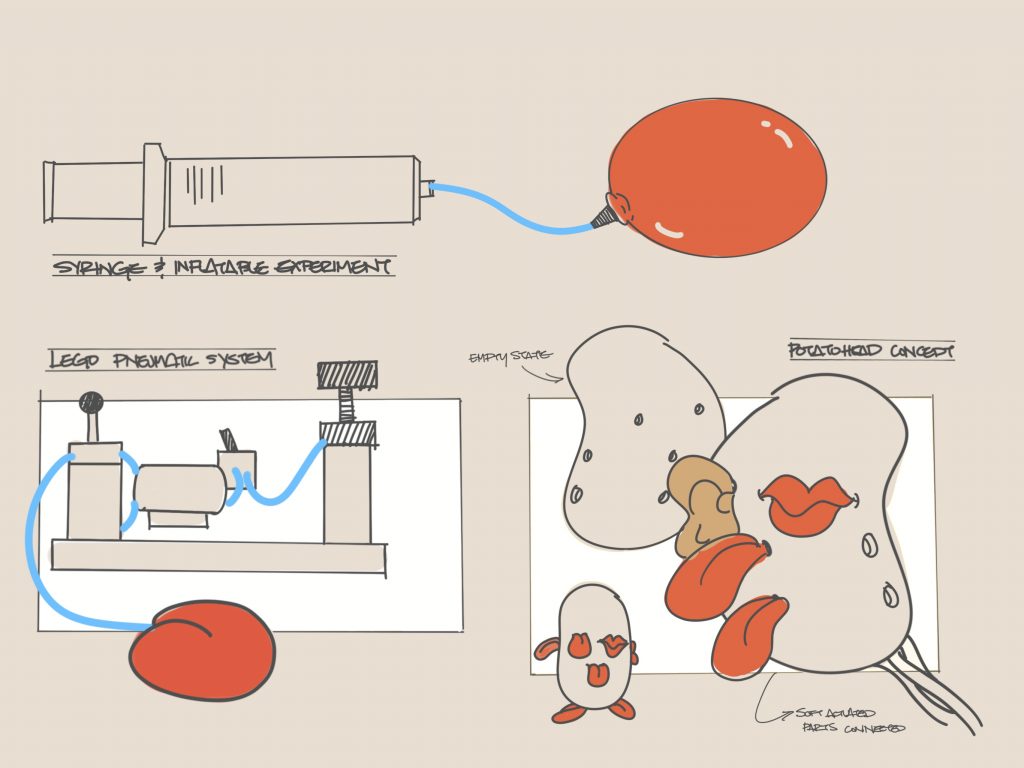
Regardless of what toy we make our parts interface with, we are planning to rely on a system of manual pumps and soft actuated parts connected by hoses to make the toys work. Because we intend to make the system modular, so actuated parts can unplug and plug into different hoses and pumps, we will need to design or adapt and test a system of interchangeable parts. We are going to prototype and test the efficiency of a rigid interface between a flexible hose and inflatable object. For this early test, since the focus is that interfacing part, we will probably just use a balloon for the inflatable piece and an off-the-shelf syringe and hose for the pump and hose. The interfacing part will be 3D printed, and the balloon will be attached to the interfacing piece with either glue, tape, or a rubber band. We will be designing this piece, and then analyzing its performance based on two factors: how efficiently it allows inflation, and how easy it is to attach and remove.
We’re looking at other pieces of art and design work that are specifically designed to interface with already existing building toys. One project we’ve considered is the Free Universal Construction Kit by Golan Levin and Shawn Sims (1). While the kit is addressing a different niche than we intend to study, it treads in similar water given its interaction with the system of an already established building toy.
On a technical level, we’re looking at a couple of places. First, we’re looking at projects that address the same space we’re looking at, such as the “Soft LEGO” project (2), which introduces inflatable Lego bricks. Our project aims to take this same concept and expand on it; rather than creating one brick that fits with a system, we are planning to create a set of different parts that can connect with a system and actuate in different ways. Second, we’re looking at different bio-inspired schemes for soft actuated movement. One example of the type of work in this vein is the soft robotic tongue (3), which we’re examining for the complex movement it achieves with a relatively simple actuation system.
Works Cited
- Golan Levin, Shawn Sims. Free Universal Construction Toy. 2012. url: http://fffff.at/free-universal-construction-kit/.
- Jun-Young Lee, Jaemin Eom, Woo-Young Choi, Kyu-Jin Cho. “Soft LEGO: Bottom-Up Design Platform for Soft Robotics.” 2018 IEEE/RSJ International Conference on Intelligent Robotics and Systems, Madrid, Spain, pages 7513-7520. 2018. doi: 10.1109/IROS.2018.8593546.
- X. Lu, W. Xu, X. Li. “A Soft Robotic Tongue–Mechatronic Design and Surface Reconstruction.” IEEE/ASME Transactions on Mechatronics, Volume 22, Issue 5, Pages 2102-2110. October 2017. doi: 10.1109/TMECH.2017.2748606.
The concept and background I discussed in the last post left a big technical hole: how to keep the tongue wet. The previous iteration of this project used a sponge for the tongue, but this presents both visual issues (it’s hard to make a sponge convincingly mimic a tongue), and mechanical issues (actuating complex movement within a sponge may not be feasible). Furthermore, the previous work I had looked at for this new version primarily used silicone, and I have some potential concerns regarding the ability of a material like silicone to hold onto water in a way that is useful.
Doing some research, I stumbled into hydrogel materials–complex structures of polymers capable of absorbing water, deformable, and biocompatible/biodegradable. They have wide applications in the medical and biotech fields, and are starting to get introduced into the field of soft robotics. Considering the tongue design discussed in the last blog post, which consists of 6 inflating/deflating chambers, a similar motion could be achieved using an electro-responsive hydrogel (1). By sending current through this material, it could swell, replacing the pneumatic air chambers in the silicone tongue. Switching to a hydrogel would allow the tongue to hold water in a manner hopefully similar to the sponge used in the previous iteration.
Furthermore, adding a microfiber layer on top of the hydrogel tongue could reduce the amount of water that evaporates from the tongue (2). Reducing evaporation may allow the tongue to perform more licks between rewettings and therefore allow for a more fluid, organic motion. This approach does increase friction, though, and may have an adverse effect on the tongue’s ability to wet the lollipop on consecutive licks.
There are some concerns about the structural integrity of hydrogels with regards to structural applications (1), and the extent to which this will be an issue for this particular project might require some testing. It is somewhat unclear to me where the line is drawn between structural and nonstructural applications.
With regards to manufacturing these materials, two possible approaches seem feasible. First, hydrogels can be directly 3D-printed using a Direct Ink Writing printer (similar in concept to a standard fused deposition modelling printer, but using liquid that dries rather than a melted solid that returns to room temperature). Mixing a carbomer solvent with the base materials for a hydrogel can create an ink capable of being 3D-printed without the use of complex, and sometimes problematic, support structures (3). Second, and likely even more feasible, is the ability to create viable hydrogels via casting in a rigid mold (2). Molds for this purpose can be produced in easily accessible materials such as PLA plastic (meaning molds can be 3D-printed). Constituent ingredients for a hydrogel can then be poured into the rigid mold removed after being properly cured.
Cited Sources:
- Hritwick Banerjee, Suhail Mohamed, Hongliang Ren. “Hydrogel Actuators and Sensors for Biomedical Soft Robots: Brief Overview with Impending Challenges.” Biomimetics, Volume 3, Issue 3. September 2018. doi: 10.3390/biomimetics3030015.
- Shuma Kanai, Yosuke Watanabe, MD Nahin Islam Shiblee, Ajit Khosla, Jun Ogawa, Masaru Kawakami, Hidemitsu Furukawa. “Skin-Mimic Hydrogel Materials with Water-Perspiration Control for Soft Robots Developed by 3D Printing.” ECS Transactions, Volume 98, Number 13, Pages 23-27. September 2020. doi: 10.1149/09813.0023ecst.
- Zhe Chen, Donghao Zhao, Binhong Liu, Guodong Nian, Xiaokeng Li, Jun Yin, Shaoxing Qu, Wei Yang. “3D Printing of Multifunctional Hydrogels.” Advanced Functional Materials, Volume 29, Issue 20, Pages 1900971. 2019. doi: 10.1002/adfm.201900971.
Additionally Consulted Sources:
- Hritweick Banerjee, Hongliang Ren. “Optimized Double-Network Hydrogel for Biomedical Soft Robots.” Soft Robotics, Volume 4, Number 3. 1 September 2017. doi: 10.1089/soro.2016.0059.
- Yin Cheng, Kwok Hoe Chan, Xiao-Qiao Wang, Tianpeng Ding, Tongtao Li, Xin Lu, Ghim Wei Ho. “Direct-Ink-Write 3D Printing of Hydrogels into Biomimetic Soft Robots.” ACS Nano, Volume 13, Issue 11, Pages 13176-13184. 26 November 2019. doi: 10.1021/acsnano.9b06144.
- Xuanming Lu, Weiliang Xu, Xiaoning Li. “PneuNet Based Control System for Soft Robotic Tongue.” IEEE 14th International Workshop on Advanced Motion Control, Pages 353-357. 2016. doi: 10.1109/AMC.2016.7496375.
This piece primarily bases its inspiration in two aforementioned sources: my former lollipop licking robot (1) and the 1970 Tootsie Pop commercial (2). A compelling presentation of the robot in video format could also take influence from the format of a show like Mythbusters (3), with its habit of over-engineering solutions to answer largely scientifically unimportant questions in the popular consciousness. Lastly, the piece would likely take an appearance of disembodied, artificial body parts housed in a sterile, inorganic chassis, similar in aesthetic to work such as Simone Giertz’s Musical Instrument Made from Teeth (4).
This new iteration of the licking robot might integrate a simplified version of Lu’s, Xi’s, and Li’s soft robotic tongue (5) from the first homework assignment. The ability to incorporate biomimetic movement into the piece would be necessary in visually telling the full story. Furthermore, an artificial jaw would be implemented in the piece to give the biting action somewhat reasonable articulation. This jaw might be inspired by the mastication robot by Lee, Kim, Chun, and Park (6).
- Paul Park, Sebastian Carpenter. “Lollipop Licker.” Computing for Creative Practice, F18, Prof. Golan Levin, Carnegie Mellon University. November 2018. url: https://youtu.be/DW7IsEc858w.
- “How Many Licks.” Tootsie Roll Industries. 1970. url: https://youtu.be/O6rHeD5x2tI.
- Peter Rees. Mythbusters. Discovery Channel. 23 January 2003 – 28 February 2018.
- Simone Giertz. “Building a Musical Instrument Out of Teeth.” 16 September 2020. url: https://youtu.be/83yXCMHGr9A.
- X. Lu, W. Xu, X. Li. “A Soft Robotic Tongue—Mechatronic Design and Surface Reconstruction.” IEEE/ASME Transactions on Mechatronics, Volume 22, Number 5, Pages 2102-2110. 2017. doi: 10.1109/TMECH.2017.2748606.
- Seung-Ju Lee, Bum-Keun Kim, Yong-Gi Chun, Dong-June Park. “Design of Mastication Robot with Life-Sized Linear Actuator of Human Muscle and Load Cells for Measuring Force Distribution on Teeth.” Mechatronics, Volume 51, Pages 127-136. 2018. doi: 10.1016/j.mechatronics.2017.11.013.
Hylozoic Soil (1) is a responsive installation piece by Philip Beesley. The work consists of a large, transparent structure suspended from the ceiling with fern-like fronds that respond to human presence. The movement of the leaves circulates air through the space, turning the piece into both a visual and a tactile experience. Like much of Beesley’s art, Hylozoic Soil examines a space of living art that gives highly biomimetic qualities to environmental-scale works.
While the installation does change over time with regards to the undulations of the fronds, the basic structure of the piece never changes. In other words, the piece doesn’t grow or navigate around a space at all. An interesting direction to take this work would be to incorporate gripping mechanisms, such as those in vines, to enable the piece to slowly navigate around a space, potentially even expand or contract, over time. To fit with the already established aesthetic of Beesley’s work and to maximize ability to grip onto a scaffolding-like structure, these gripping mechanisms would necessarily be soft robotic systems.
One potential biomimetic technology would be robotic coiling mechanisms (2), similar to those in some climbing plants. These coiling tendrils could easily fit visually with the plant-like aesthetic of Beesley’s work, while also providing a method to enable gripping to a baseline structure. By engaging and disengaging these coils in some sort of pattern, it might be possible to bring an incremental location-based motion to this work. Responsiveness could be explored in new ways, and the fantastical characteristics of this work could be expanded in yet new ways.
- Philip Beesley. Hylozoic Soil. Musée Des Beaux-Arts, Montréal, Québec, Canada. 2007. url: philipbeesleystudioinc.com/sculptures/0635hylozoic_soil/.
- Renato Vidoni, Tanja Mimmo, Camilla Pandolfi. “Tendril-Based Climbing Plants to Model, Simulate and Create Bio-Inspired Robotic Systems.” Journal of Bionic Engineering, volume 12, issue 2, pages 250-262. April 2015. doi: 10.1016/S1672-6529(14)60117-7.
Ninety Six is an installation piece by Nils Völker that consists of 96 garbage bags, each with an independently controlled set of fans underneath. The bags inflate and deflate to create rhythmic patterns and undulations across the piece. From a distance, the piece starts to look like a single, living thing. The grid-like structure and artificial appearance of the trash bags starts to fade as the piece starts to feel more and more organic as it is watched.
Ninety Six was part of the 2014 exhibition, Höhenrausch, at OÖ Kulturquartier in Linz, Austria.
Nils Völker. Ninety Six. Höhenrausch, OÖ Kulturquartier, Linz, Austria. 2014. url: nilsvoelker.com/content/ninetysix/.
]]>I have no conflicts of interest with regards to this paper or the research it discusses. I would identify myself as having somewhere between no knowledge and passing knowledge in the field relevant to this paper.
This paper discusses in-progress research that aims to create an elongated, undulating soft swimming robot capable of navigating tight spaces in coral reefs without causing damage. While other researchers are doing similar work, the research presented in this paper focuses on a robot of this form factor powered by pneumatic pulses, which appears to be a novel method for this form factor.
The researchers creating this paper provide clear diagrams and effectively justify the novelty of their work and describe the background research as well as different forms of fish locomotion (valuable to readers with weaker biological backgrounds). At the same time, though, the paper is plagued with spelling and grammatical errors, which range in effect from minor annoyances (dropping articles, for example) to mistakes that completely alter the sentence’s meaning (e.g. misspelling “silicone” as “silicon,” a distinct material with wildly different mechanical and chemical properties).
The diagrams provide helpful aids in justifying the soundness of the research and algorithms explored in the paper. Clear explanations of the design process, kinematic theory, and experiment setup and findings creates a sound paper.
The paper does discuss related and prior work, although it’s discussion might be a little light. Based on the prior work presented in the paper, the researchers demonstrate a clear gap, as all other work presented uses alternative actuation methods or form factors. Despite this, though, the background work section feels light. I am left somewhat unconvinced that this research is entirely novel.
The paper is incredibly well organized, sections flow logically and the diagrams and citations accompany content in meaningful locations. As mentioned earlier, though, spelling and grammar do illustrate some presentation issues, making sections of the paper challenging to easily understand.
This paper would benefit from two things: a more thorough discussion of related work and a heavy proofread for grammar and spelling. Perhaps more examples of related work, or examples of incredibly similar research, if it exists, and a nuanced justification of why this research is different might be helpful. And having a lab assistant proofread the paper (2 hours or less of labor) would easily solve the communication issues.
Comments to Committee: I would consider this paper a borderline case. It appears to be novel and original, and the work discussed is absolutely relevant to the field, but the paper suffers from some presentation issues and could benefit from a more thorough discussion of related work. The work appears to be a worthwhile contribution, but these issues might be too detrimental to the overall success of the paper.
Overall, I would classify this paper as a borderline case. I would not argue strongly for accepting the paper, but I am also not convinced that the paper’s flaws are enough to justify an outright rejection.
]]>