Pivoting from focusing on the practical application to utilizing the interesting properties of the material that we have chosen. By focusing on what we wanted the result to look like then working backwards, we pigeonholed ourselves and lost sight of what we were trying to achieve.
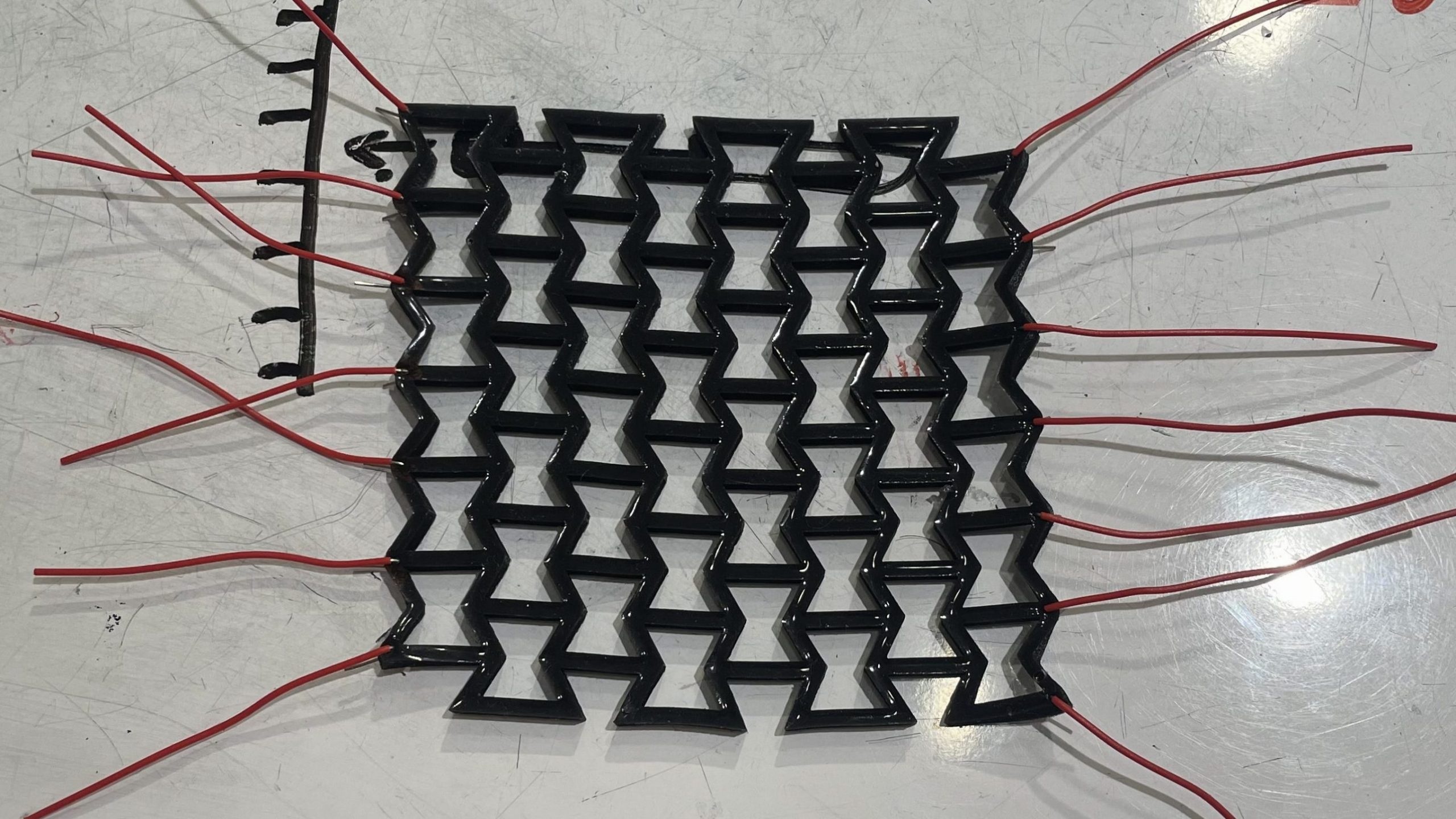
Our new prototype with the stiffer silicone worked much better, and informed us of what changes can be made to the shape of our grid.
Our new direction is based more on the novel properties of the auxetic material, and how that can be presented visually. Our idea looks like this:
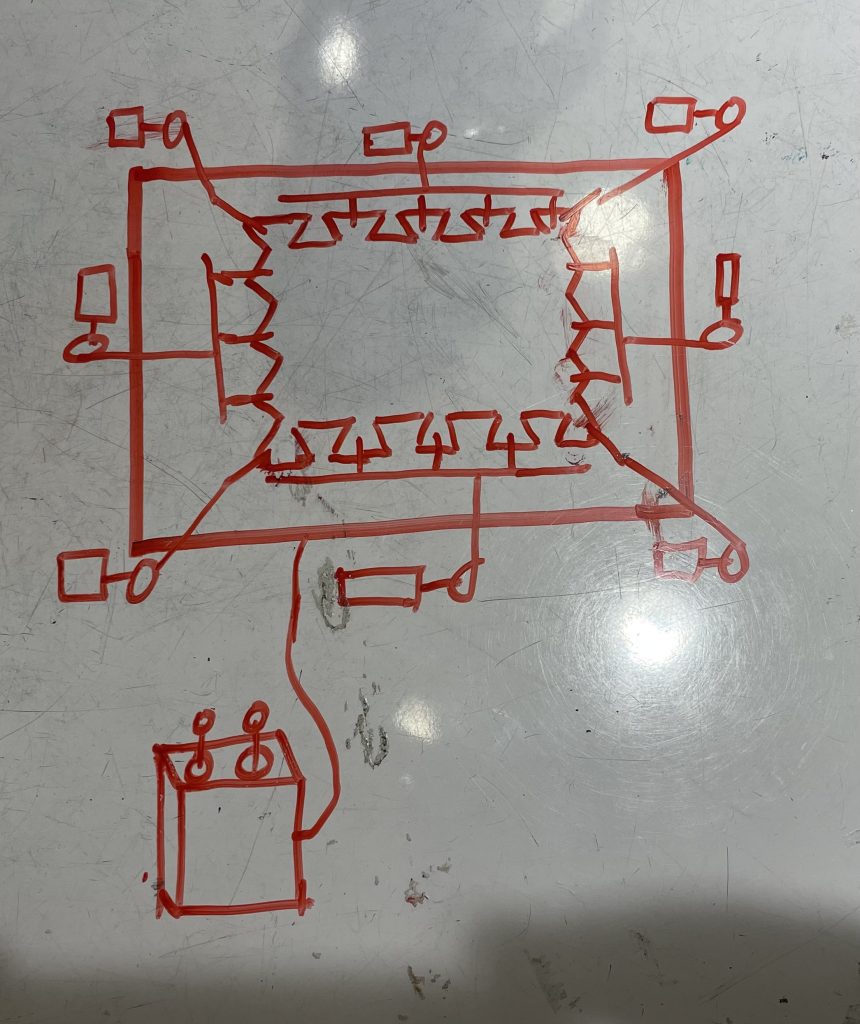
This system has an auxetic mesh in the center, with 8 servos on the outside of a frame to manipulate the mesh. A user will interact with two joysticks that control the servos. The purpose of this system is to express the unique visual and kinetic properties of auxetic metamaterials in an interactive way. The mesh will morph and stretch in appealing and unexpected ways, which will demonstrate how auxetic materials differ from materials we interact with in everyday life.
Our next steps are working on the design of the system, as well as the design of the auxetic mesh.
Design elements for the auxetic:
- Infill density
- Non-uniform shape distribution
- Number of different auxetic meshes the user can interact with
- Images when deformed?
- Thickness/non uniform
Design elements for the system:
- Buttons vs joysticks
- Number of servos
- Constrained vs unconstrained sides
- How to implement shear
Workflow:
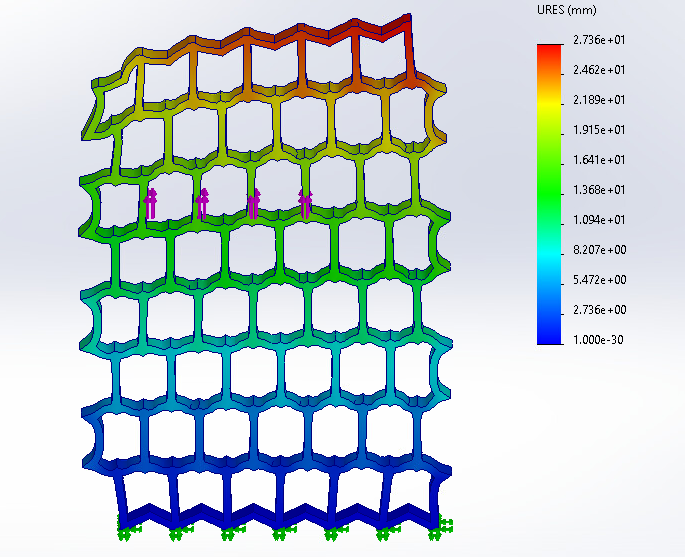
- Work on the deformation simulations
- Rework auxetic design
- Start designing system