RoBoa: Construction and Evaluation of a Steerable Vine Robot for Search and Rescue Applications
10.1109/RoboSoft51838.2021.9479192
Conference: 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), April 2021
- Do you have any conflict of interest in reviewing this paper?
- No
- Expertise. Provide your expertise in the topic area of this paper.
- 2, passing knowledge
- Summary. Please summarize what you believe are the paper’s main contributions to the field of soft robotics.
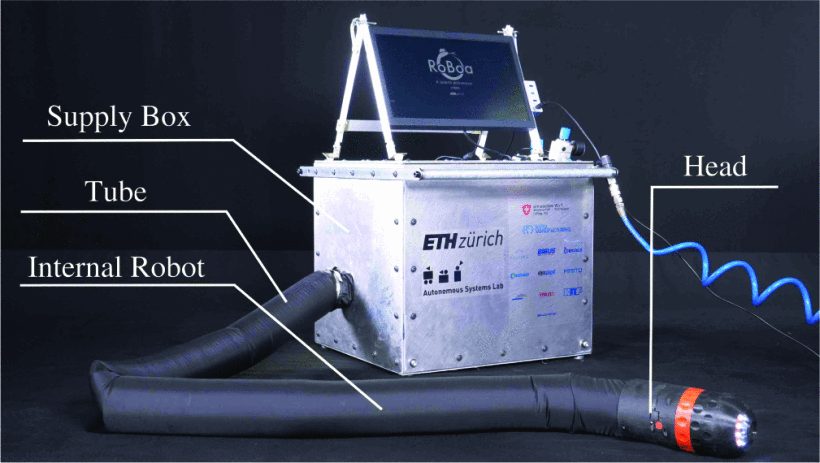
- The RoBoa is a pneumatic search and rescue vine robot that is designed for people recovery during catastrophic events. Powered by pressurized air and a series of actuators throughout the length of the arm, this robot provides 2 unique contributions to the field of vine-like robotics; 1) an imaginative new way of steering the robot and 2) proof of real world functionality. Looking at the first point, the RoBoa uses the pneumatic actuators to steer from the front of the arm, making manufacturing and piloting significantly simpler. These two aspects are key for real world acceptance. The second contribution comes from the scale at which they were able to produce this robot. The team was able to build a 17m long version of this, and test it in off the bench situations, which is a good proof of concept for this type of robot.
- Strengths and Weaknesses. What are the main strengths and weaknesses of this work? Does the paper have strengths in originality and novelty?
- The overarching design restrictions and their solutions were very well defined and thought out.
- There is very little detail about the actual design, as dimensions and assembly were omitted from the paper. This makes it difficult to reproduce and verify the results.
- The authors made it clear what their goals were and how they differentiated from other works.
- The testing section of the paper was relatively sparse and did not go into detail about the lessons learned from testing.
- Soundness. Are the ideas, algorithms, results or studies technologically/methodologically sound?
- The design of the RoBoa appears to be sound. However, it is difficult to tell due to the lack of technical detail given in the paper. There are very few figures or images that would give more insight into the soundness of their designs.
- Related Work. Does the paper adequately describe related and prior work?
- The authors do a good job of describing current iterations of the vine like robot, and clearly define how their design differs. While not too many examples are written about in the paper, the references are mostly robust.
- Presentation. Is the paper well organized, well written and clearly presented?
- The paper is very well laid out, with the sections having a logical flow that facilitated in the understanding of their goals and approach. The writing is clear, and explains almost all of the concepts in easily interpretable language. However, more images would have helped in the understanding of how this robot works.
- Suggestions. Do you have suggestions for improving this paper?
- Provide more technical detail about the robot, including more figures showing the components and functionality
- Write more about the testing and experimentation. Section 3 is very sparse.
- Comments to Committee (Hidden from authors). Does the paper have enough originality and importance to merit publication? Is the paper relevant to the field? These comments will NOT be sent to the authors:
- Yes, this paper does build on past work enough such that it proposes new ideas and directions for robots of this type. While there needs to be more testing on the robot, they have done novel work in the design and manufacturing.
- Overall Rating. Provide your overall rating of the paper (5 is best)
- 4. This paper does advance the field enough to warrant publishing. It seems as though this is not a final stage paper, I would expect to see more content in the authors’ final offering. However, this is an interesting robot that should make the cut for the conference.