Software development requires you use an editor that supports plain text (ASCII and UNICODE) and doesn’t do goofy formatting things with HTML. Most (all?) software development editors will handle JavaScript. Note that “which editor is best?” is what we refer to as “an underwear argument.” This is when adults waste countless hours arguing about briefs, boxers, boyshorts, thongs, hipsters, and going commando.
Open source options include:
emacs — steep learning curve but worth the effort. This is my editor for all programming languages including TeX (a markup language popular for academic papers).
atom — like emacs but for people who are younger than emacs. Lots of interesting ways to customize for other applications. For example, it’s my Python editor when I’m using the Rhino CAD software and writing a Python script to modify models.
sublime — like atom but different. Very popular on the Mac as a replacement for BBEdit, predates atom.
There are plenty of commercial options, if you already use BBEdit (equiv) or XCode that should be fine.
This project is supposed to be an embodiment of Steve Reich’s Clapping Music. The code for this project has two versions. The first version works unreliably because it uses the delay function to time the LEDs. The second uses a helper function to time and illuminate the LEDs using millis(). This program does not even finish compiling though. It probably just needs debugging, but I am not sure. With the original program, the interrupt does not reliably switch the case. To continue this project, I will use solenoids to make a percussive sound.
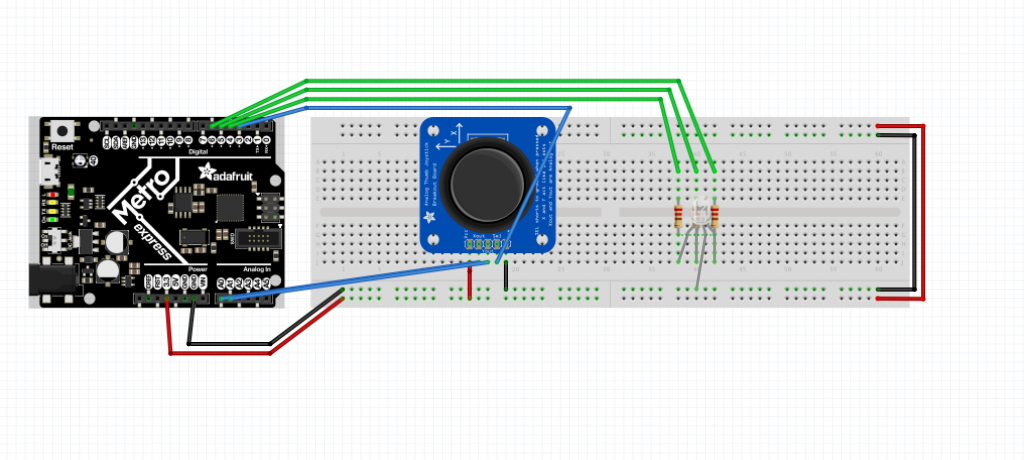
The circuit shown above is a 3 pin led connected to a joystick. It uses the JoyStick movement to change the RGB values and the button press in the joystick is used to switch between states. The system has 5 states
All off
Red constant, change G and B by moving the joystick
Green constant, change R and G by moving the joystick
Blue constant, change others through joystick
All on.
Reflection: if I were to redo this, I would transfer the states from 2, 3 and 4 making it a real color picker, and I also think the joystick button may not be ideal for an interrupt.
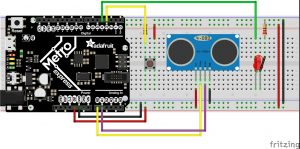
I wanted to build upon and improve the previous assignment. The goal is to balance at a certain distance in order to turn on the LED, but done through a classic game of hot or cold. While it’s rather trivial, it has helped me to better understand the ultrasonic sensor and its possibilities. refining the sensor data and perfecting the timing is something that I’d like to explore further down the road.
The states are used in order to guide you through the game. State one lets you now that the game is ready, state two sets a random number for you to find using the ultrasonic sensor, and in state three…you find the number. Prompted in the serial monitor if you are getting warmer or colder.
void SwitchPressed() { if(digitalRead(switchPin)== HIGH){ // this is why people hate C
buttonState ==3? buttonState =0: buttonState++; } // Serial.println(buttonState); }
// attach the interrupt pin to a method if(isInterrupt){
attachInterrupt (digitalPinToInterrupt (switchPin), SwitchPressed, CHANGE); }
randomSeed(analogRead(2));
pixels.begin();// This initializes the NeoPixel library. }
void pixelBlinkGreen(){
pixels.setPixelColor(0, pixels.Color(0, 255, 0));
pixels.show();// This sends the updated pixel color to the hardware.
delay(500);
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();// This sends the updated pixel color to the hardware.
delay(500); }
void pixelBlinkYellow(){
pixels.setPixelColor(0, pixels.Color(255, 200, 0, 75));
pixels.show();// This sends the updated pixel color to the hardware.
delay(250);
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();// This sends the updated pixel color to the hardware.
delay(250); }
void pixelBlinkWhite(){
pixels.setPixelColor(0, pixels.Color(255, 255, 255));
pixels.show();// This sends the updated pixel color to the hardware.
delay(300);
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();// This sends the updated pixel color to the hardware.
delay(250); }
void pixelBlinkPink(){
pixels.setPixelColor(0, pixels.Color(254, 6, 141));
pixels.show();// This sends the updated pixel color to the hardware.
delay(300);
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();// This sends the updated pixel color to the hardware.
delay(250); }
void pixelOff(){
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();// This sends the updated pixel color to the hardware. }
Goal: The goal for my state machine was to build a basic alert system that tells you when there is someone/something in the proximity. The switch is the state change that turns the entire alert system on or off. This is essential for the edge case when you are expecting many people and do not need to be alerted. There were three LED colors: yellow for idle (nothing in the proximity), red for something physically there and it is light out, and green for something physically there and it is dark out.
Reflection: If I were to update/re-do this, I would change the code so the interrupt is the proximity sensor rather than the switch. I would also change the light so the green represents light and proximity and red represents dark and proximity. This would align with my overarching ideal goal to make a front door security system. I would also change the light/dark reading to a boolean.
(My unstable hand is to blame for the flickering green light)
// Define constant values.
// The wiring assignment.
#include
static const int SWITCH_PIN = 3;
static const int LED1Pin = 4;
static const int LED2Pin = 5;
static const int LED3Pin = 13;
static const int lightSensor = A0;
bool LEDState = false;
static const int sampleSize = 16;
unsigned int readings[sampleSize];
unsigned int sampleIndex = 0;
static const int nighttime = 50;
const int TRIG_PIN = 9;
const int ECHO_PIN = 8;
const int MAX_DISTANCE = 700;
// ================================================================================
// Configure the hardware once after booting up. This runs once after pressing
// reset or powering up the board.
void setup()
{
// Initialize the serial UART at 9600 bits per second.
Serial.begin(115200);
pinMode(LED_BUILTIN, OUTPUT);
pinMode(SWITCH_PIN, INPUT);
pinMode(LED1Pin, OUTPUT);
pinMode(LED2Pin, OUTPUT);
pinMode(LED3Pin, OUTPUT);
pinMode(lightSensor, INPUT);
pinMode(TRIG_PIN, OUTPUT);
digitalWrite(TRIG_PIN, LOW);
// Initialize the echo pin for input.
pinMode(ECHO_PIN, INPUT);
// ================================================================================
// Run one iteration of the main event loop. The Arduino system will call this
// function over and over forever.
int median = 0;
int low = 1024;
int high = 0;
int mean = 0;
for (int i = 0; i < sampleSize; i++) {
mean += readings[i];
if (readings[i] < low) { low = readings[i]; } if (readings[i] > high) {
high = readings[i];
}
}
mean = mean / sampleSize;
bubbleSort();
median = readings[sampleSize / 2];
//TURNED ON, IDLE STATE
if (LEDState && sonar.ping_median() < 700 && mean > nighttime ) {
digitalWrite(LED1Pin, 255);
digitalWrite(LED2Pin, 0);
digitalWrite(LED3Pin, 0);
}
else if (LEDState && sonar.ping_median() < 700 && mean < nighttime ) {
digitalWrite(LED1Pin, 0);
digitalWrite(LED2Pin, 0);
digitalWrite(LED3Pin, 255);
}
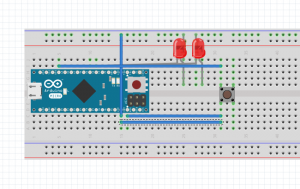
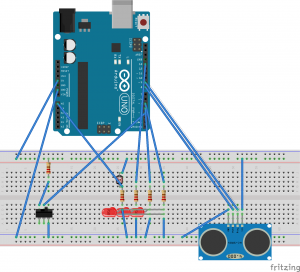
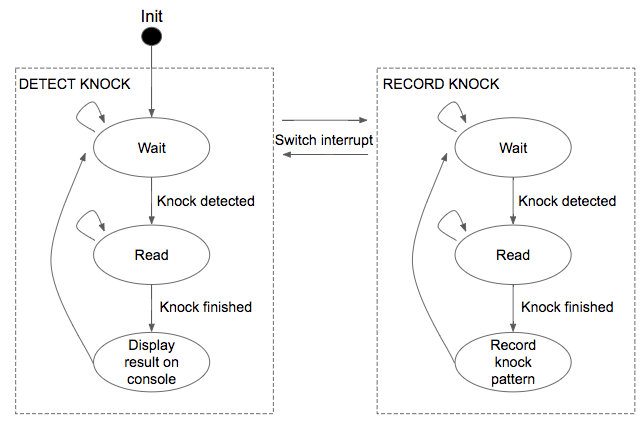
Imagine your desks, doors, and floors turning into an interface that responds to knocks. What if you could control room lighting with the silent knocks? What if you could customize the knock interaction for each object? In this assignment, I built an interactive system that is able to detect and record knock patterns. Used a piezo sensor to detect the knock vibrations and a button to trigger interrupt to switch 2 different modes – detect and record. Knock detection result is displayed on a console.
The system consists of 6 states in total – wait / read / output for detect mode and wait / read / record for record mode.
Due 23:59, 29 January 2018. We will discuss in class on the 30th and suggest improvements or analyze different ways to resolve your problem.
Requirements
State a question or process you would like to solve. (Ex: “control the lights in a room based on a door being opened and curtains being opened or closed.”) Create a physical interaction using a state machine driven by inputs and interrupts that collects data, interprets the data, then displays a result via console, LEDs, or other output devices. Speakers are acceptable but must be executed in a useful manner, kinematic solutions are also welcome.
The state machine should have at least three states not including on and off states. Declare whether your states have an order or if any state can transition to another state.
Post a short video showing the various states, I suggest vimeo or youtube. For your Arduino and Fritzing sketches, make a zip file or gzip/tar bundled and post that to the blog.
Second, the problem I had with my Metro was apparently a short. When I got back to my studio I took out all the components and my Metro worked fine. I replaced the components one by one, doing a new build and upload on each component. By the time I was finished, it all worked correctly.
Magic.
Interrupts
Interrupts are a part of our daily life. The best example is a door bell. You have two options:
1) Go to the door once a minute and see if anyone is there.
2) Install a door bell. When someone comes to the door they push the bell and you are notified. You can choose whether or not to respond to the door bell.
Almost every input to a computing device is based on interrupts:
buttons on your mobile
game controllers
controls on a microwave or stove
Take a look at the attached Arduino and Fritzing sketches. We will continue to discuss interrupts as well as state machines on Thursday. I’ll email the reading assignment in a few, please read it and be prepared for a short discussion on potential interaction methods.
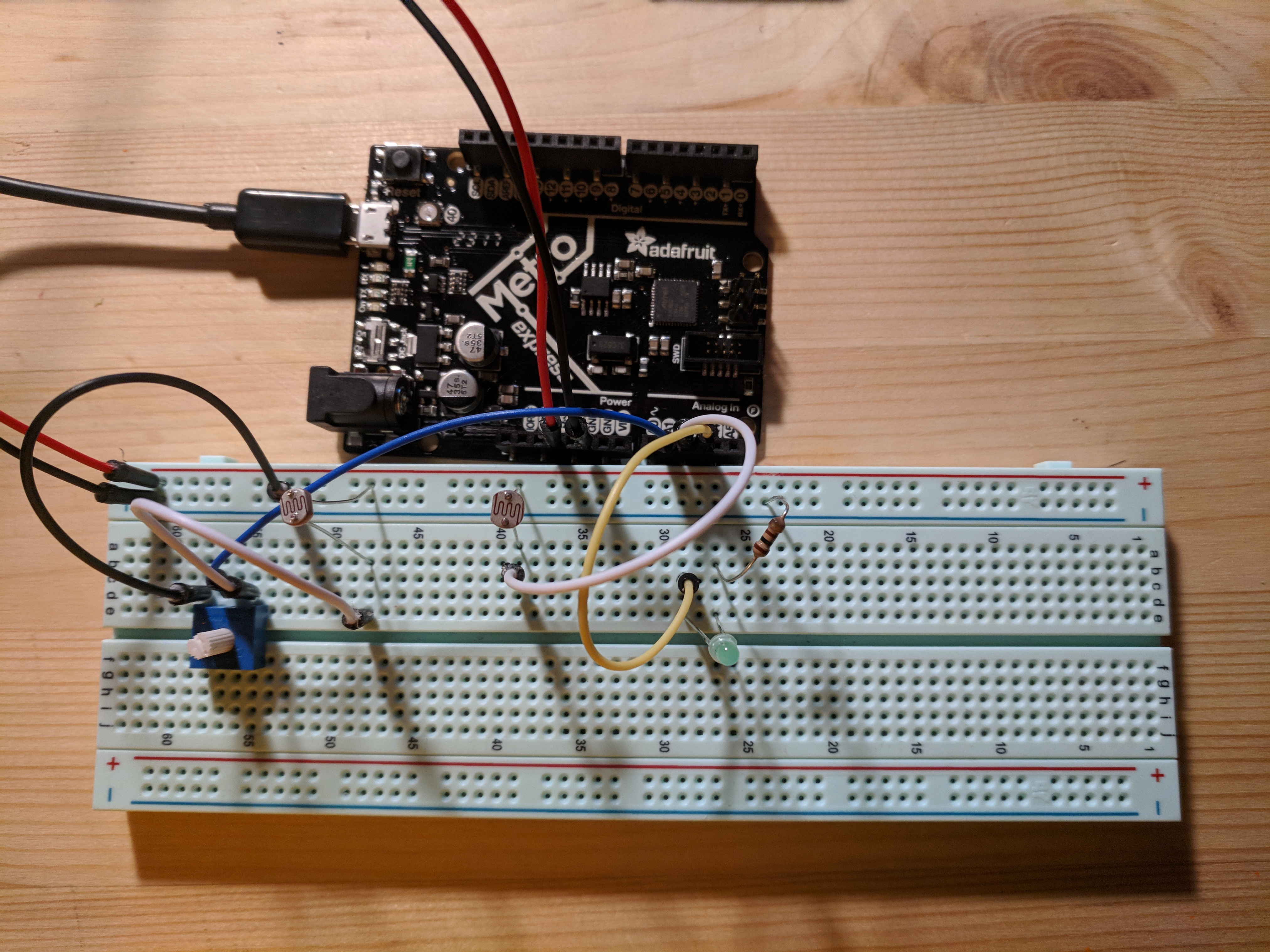
This is ment to be a toy for cats and dogs, where the closer they are to the toy, the brighter the LED is going to be. And when they put their paws on th button (it’s a photoresistor), the LED with stop for however long they leave their paws in place.
Material:
1x IR distance sensor
1x photoresistor
1x 3.3v LED
1x 10k potentiometer
1x 220 resistor
Adafruit Metro M0 Express
Setup:
Initially prototyped with 2 photoresistor instead of ir sensor to test the data (which haven’t really happen yet)
Code:
/*
Jean Zhang
This is a sketch about a toy for pets (hopefully).
This is Ver 1.0 which is a easy prototype, a proof of
concept that the code/board/sensors works properly.
This code is modified from the class 2 note from
Prof. J. Eric Townsend.The lisence is as the following:
The MIT License (MIT)
Copyright (c) 2014 J. Eric Townsend
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
This code is modified from the original code by Jean Zhang.
Lots of thanks to Robert Zacharias and Professor Garth Zeglin for helping out with debugging and making the code to properly compile.
*/
const int irPin = 0;
const int photoPin = 1;
const int ledPin = 8;
const int sampleSize = 16;
int irIndex = 0;
int irReadings[sampleSize];
int photoIndex = 0;
int photoReadings[sampleSize];
int distVal, photoVal, ledVal;
const int ambientPhoto = 600;
const int tolerance = 200;
void loop() {
//Reading the values from ir and photoResistor
int photo = analogRead(photoPin);
photoReadings[photoIndex] = photo;
photoIndex = (photoIndex + 1) % sampleSize;
//Get readings for irSensors
int *pirReadings = irReadings;
distVal = getVal(pirReadings); // feed the pointer of the array (array location)
// photoVal = getVal(*photoReadings);
// console
#if 0
Serial.print("low ");
Serial.print(low);
Serial.print(" high ");
Serial.print(high);
Serial.print(" mean ");
Serial.println(mean);
Serial.print(" median ");
Serial.println(median);
delay(500);
digitalWrite(photoPin, LOW);
delay(500);
#endif
int ledVal = map(distVal, 0, 1023, 0, 255);
//0 (min) is based on the ambient setting
//Modified from class note:
int getVal(int *readings) { //return mean for now
int median = 0;
int low = 1024;
int high = 0;
int mean = 0;
for (int i = 0; i < sampleSize; i++) {
mean += readings[i];
if (readings[i] < low) { low = readings[i]; } if (readings[i] > high) {
high = readings[i];
}
}
mean = mean / sampleSize;
bubbleSort(readings);
median = readings[sampleSize / 2];
return mean;
//return median
}
//In C, a function cannot return an array
// tigoe's sort for an array
// since bubbleSort changes the array locally, the function doesn't
// need to return any value
void bubbleSort(int *readings) {
int out, in, swapper;
for (out = 0 ; out < sampleSize; out++) { // outer loop
for (in = out; in < (sampleSize - 1); in++) { // inner loop if ( readings[in] > readings[in + 1] ) { // out of order?
// swap them:
swapper = readings[in];
readings [in] = readings[in + 1];
readings [(in + 1)] = swapper;
}
}
}
}
Reflection:
I haven’t been able to get my hardware to work at the moment (just started testing like 10min ago). I spent a lot of time trying to debug the program. I had lots of issue with C++ since I didn’t really learn how to program in C besides reading codes for reference in my Python Projects (so much less work…).
My biggest issue is with the syntax of functions and the “pointer” in C. I wanted to make the return median/mean part into a function and use bubbleSort multiple times on different sensor values, where instead of changing the global, it takes in an array and sort that array. The problem being when defining function, it is defining certain type of data/value. And the take-in value need to be defined for their data type . However, when the take in value is an array, the pointer concept comes into play, and I keep getting the error like this
invalid types 'int[int]' for array subscript
After lots of Google-ing and reading comments I start to understand the concept of pointers and modify my code accordingly. (It is actually a really simple solution, kinda like the x.^x – the dot syntax in MATLAB). Instead of using :
void bubbleSort(int readings) { ........
Simply change the expression into:
void bubbleSort(int *readings) { ........
Note the different between “int readings” and “int *readings“. Where *readings is a pointer and readings is not really a valid input.
I also tried to return an array for bubbleSort, which I don’t have to do that (bad habit writing python programs, it does so much for you). In C, a function cannot return an array, instead, the way to return arraies is to use pointers, which also gave me a lot of problems when compiling.
Lots of thanks to Robert Zacharias and Professor Garth Zeglin for helping with the bug in the code (mainly for the pointer spaghetti) and making the code compile properly.