Category
Project 1
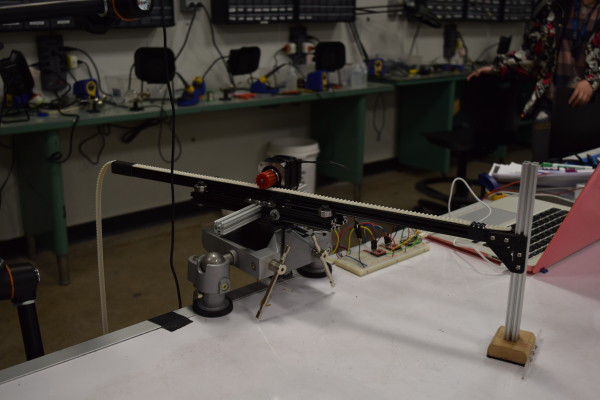
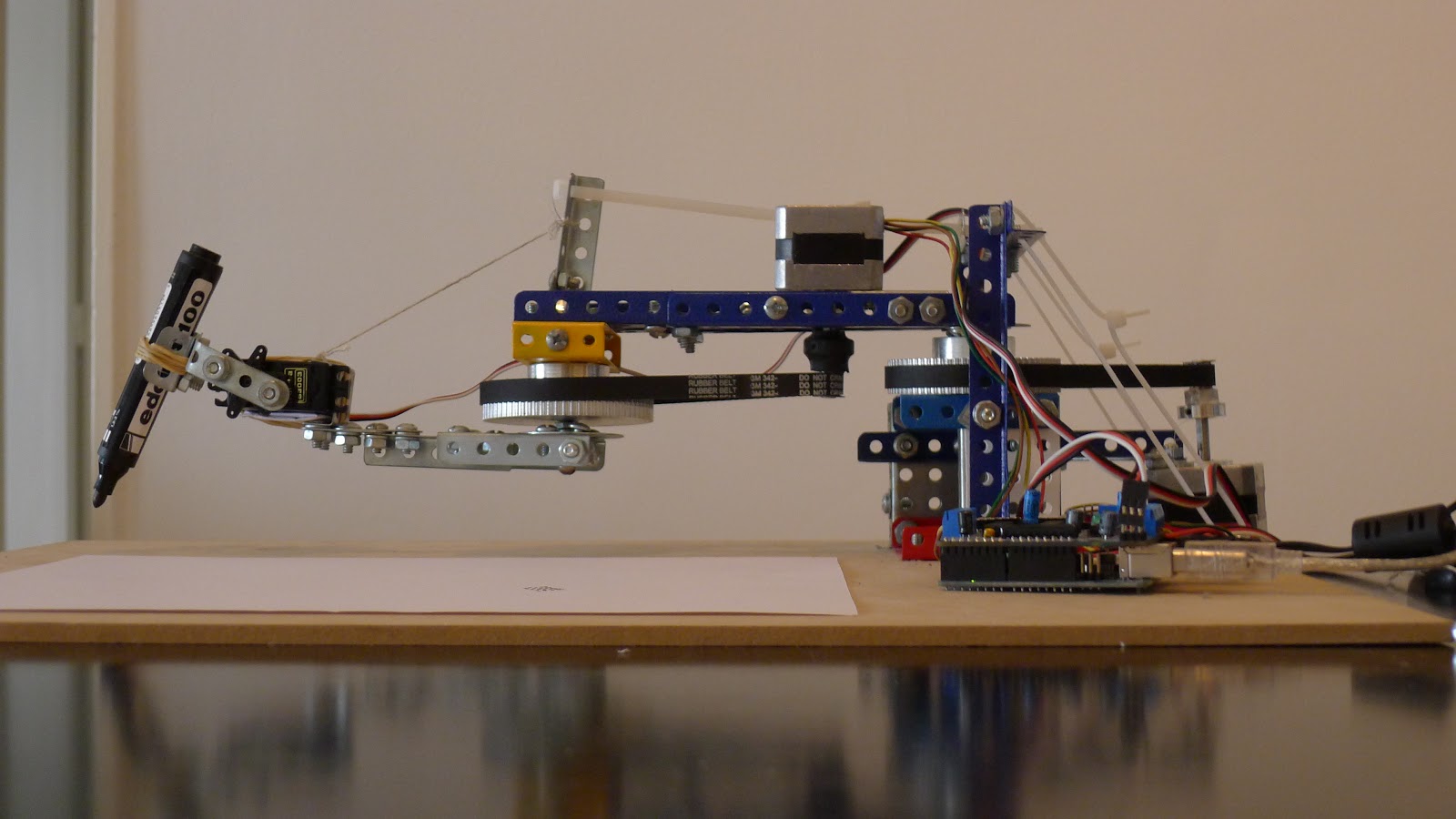
This creation combines the complexity of physical mechanisms and electronics while following the inputs of a camera. Our main goal was to have the polar system to find all the dirty areas on the whiteboard with a camera and… Continue Reading →
For the project 1. We adapted Computer Vision and Image Processing techniques to detect the marks on board. To make use of an external webcam, I installed imagesnap on OS X. You can install it through Homebrew or other package… Continue Reading →
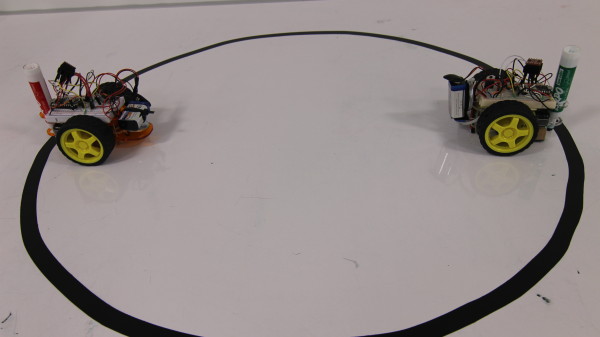
Process Abstract Sumo Bots are a pair of miniature robots looking to wipe the opponent out of a small arena. Inspired by a conglomerate of robots that are put in combat with each other, these Sumo Bots are… Continue Reading →
OBJECTIVE Make a wheeled robot that completes a challenge on a whiteboard table. Your team may choose from one of the challenges below: Normal Challenge Solve a Maze bonus: make it draw the maze first Draw an algorithmic pattern [S+A]… Continue Reading →