Page 4 of 5

The Moon Drawings Project is an initiative by the CMU based Moon Arts Team that will use a rover to draw pictures on the moon. Chosen: Unlike the other two drawing machines, I chose this piece due to it’s deeper… Continue Reading →

Explained: Using an actuator based reel system, artist Harvey Moon is able to draw complex images with this machine. Chosen: Like the first piece I chose, I loved how this drawing machine uses simple motion to create dynamic results…. Continue Reading →
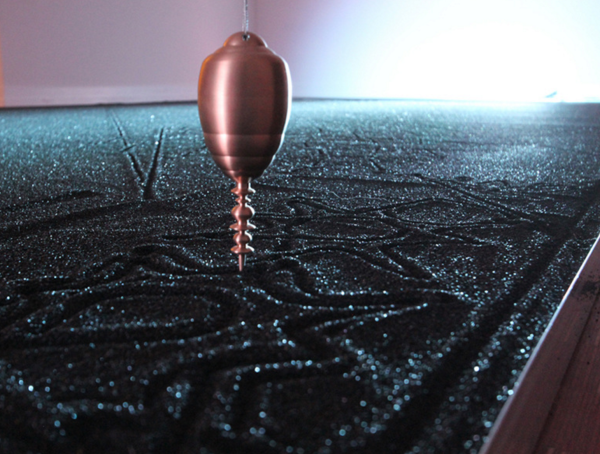
Intro: I recently went to a show opening at the Miller Gallery by the name of “Maximum Minimum In Unum.” One of the pieces displayed was “Entropic Order” by Laleh Mehran. http://lalehmehran.com/Entropic-Order Explained: In this work, a pendulum-like device is… Continue Reading →
Explained: A complete kit sold by Parallax at $135 for one, and $225 for a complete kit. It uses BASIC Stamp control boards and comes equipped with servos, QTI line sensors, and other components all mounted on an aluminum… Continue Reading →

Polar Arm with Arduino Created by Alessandro G. EXPLAINED: A way of drawing inputted data with high accuracy on paper with a swivel polar arm creation CHOSEN: This project was chosen because it could be modified to clean a whiteboard table in designated… Continue Reading →

5RNP EXPLAINED: A drawing robot exhibition which gathering visitors’ portrait based on image processing. CHOSEN: This project is a good example as a combination of art and technology. Which gives the robots a different charm. And the usage of computer vision… Continue Reading →
EXPLAINED: The arduino-based drawing robot has a marker that it controls through… Continue Reading →
EXPLAINED: Tracerbot will circle while tracing on paper a object placed next to it. It utilizes a Spark Photon kit, cut out plexi sub-structure, wheels, 9v batteries, sensors and more. It detects a objects shape and leaving a outline of… Continue Reading →
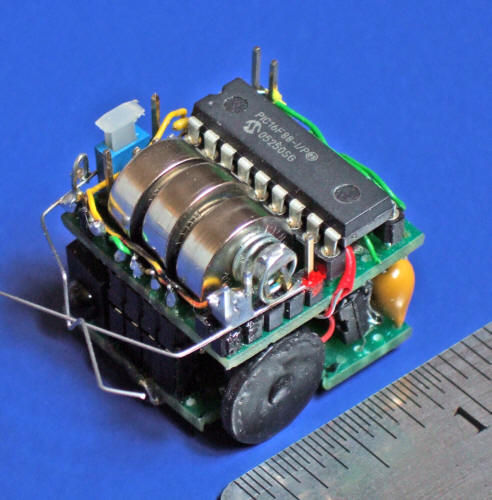
EXPLAINED: An autonomous sumo robot that is only one cubic inch in volume. CHOSEN: I chose this robot because it is an incredibly small robot. One of our ideas was to build one of our sumo bots smaller, but not nearly… Continue Reading →

Hoberman Sphere Computational Design of Mechanical Characters Mechanical Movements Strandbeests Pen Plotters [I | II | III] Rapid Prototyping Design and Control of Tensegrity Soft Robot for Locomotion Omnidirectional Wheels Vertigo