Mobile Robot: Stalker & Prey
|
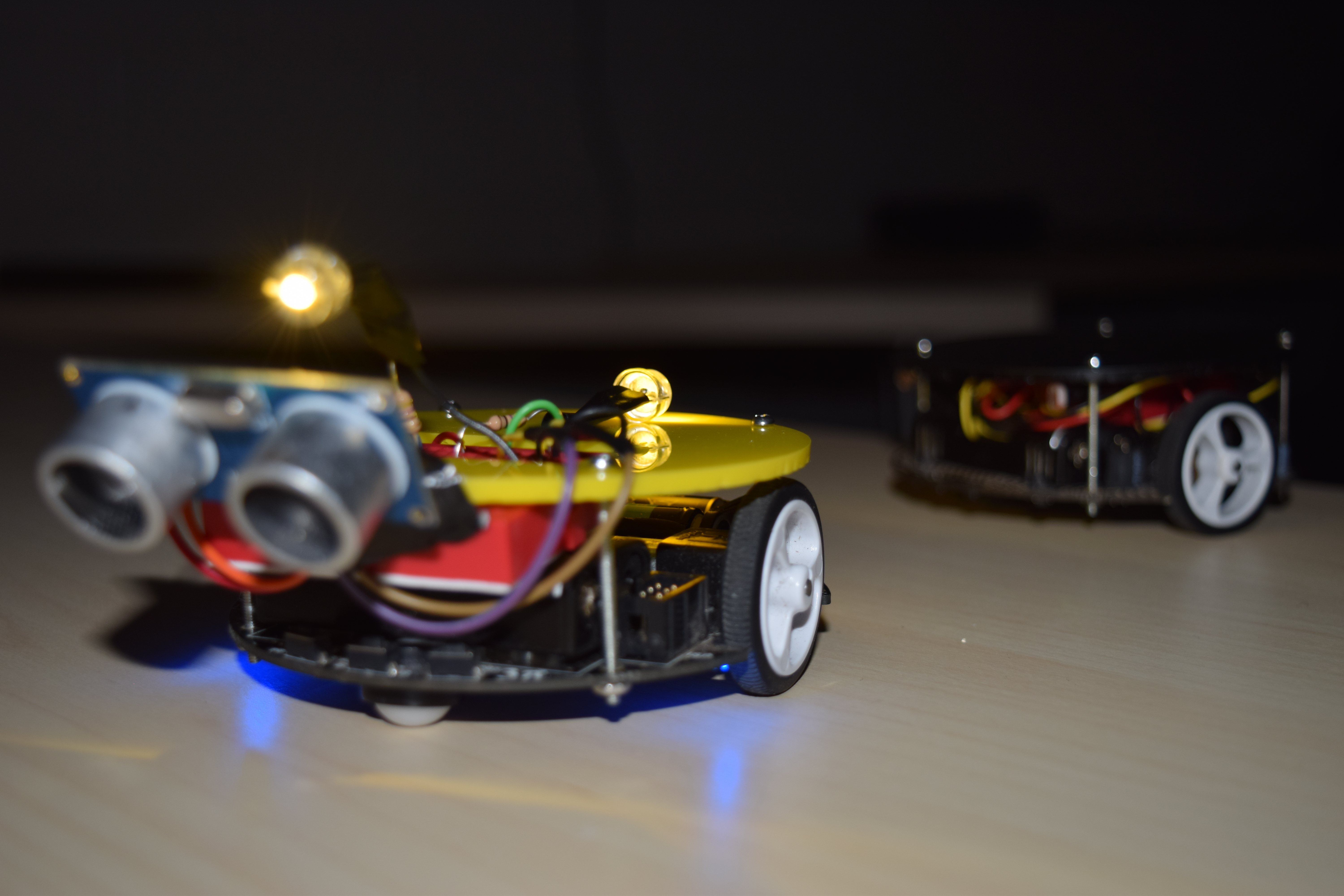
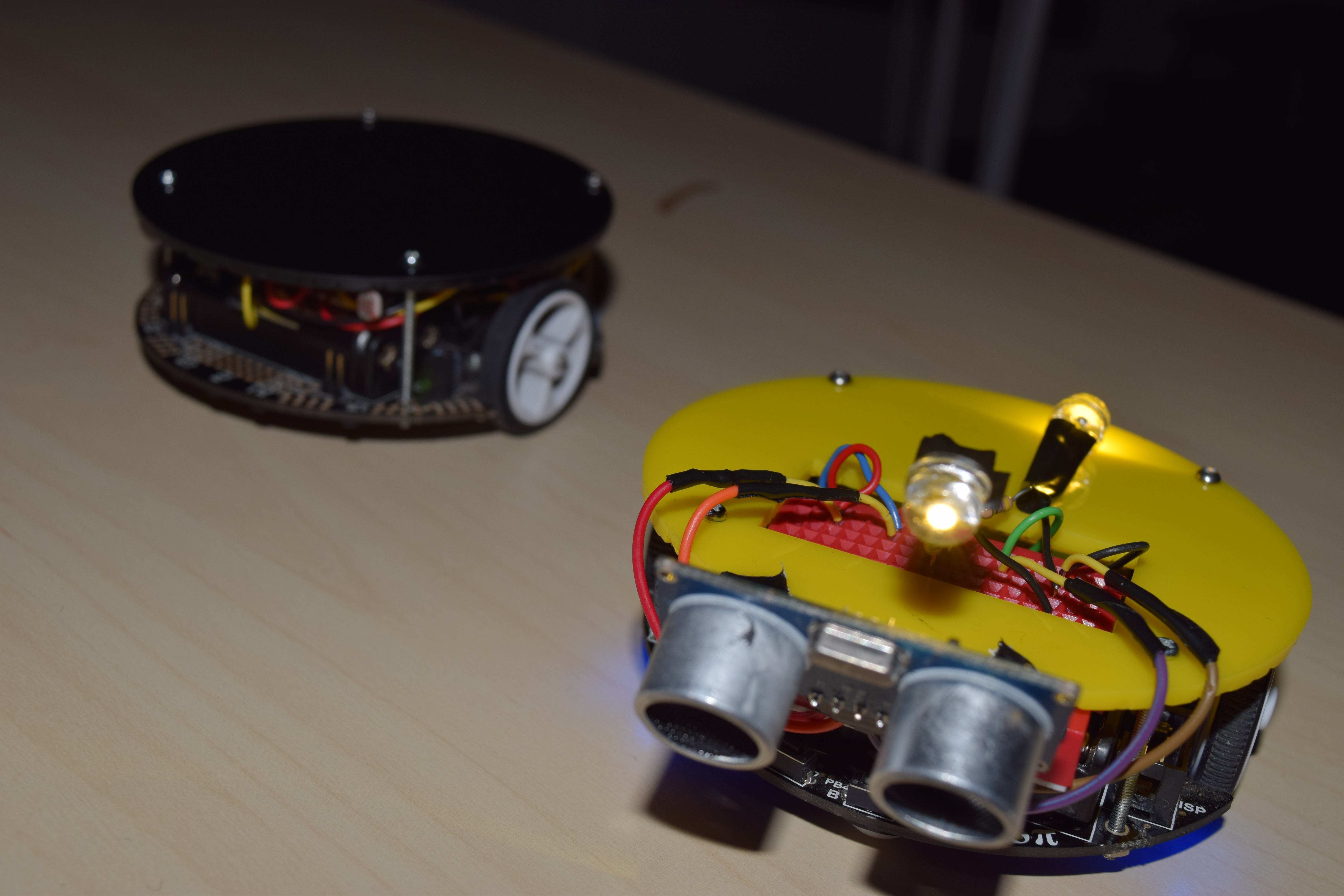
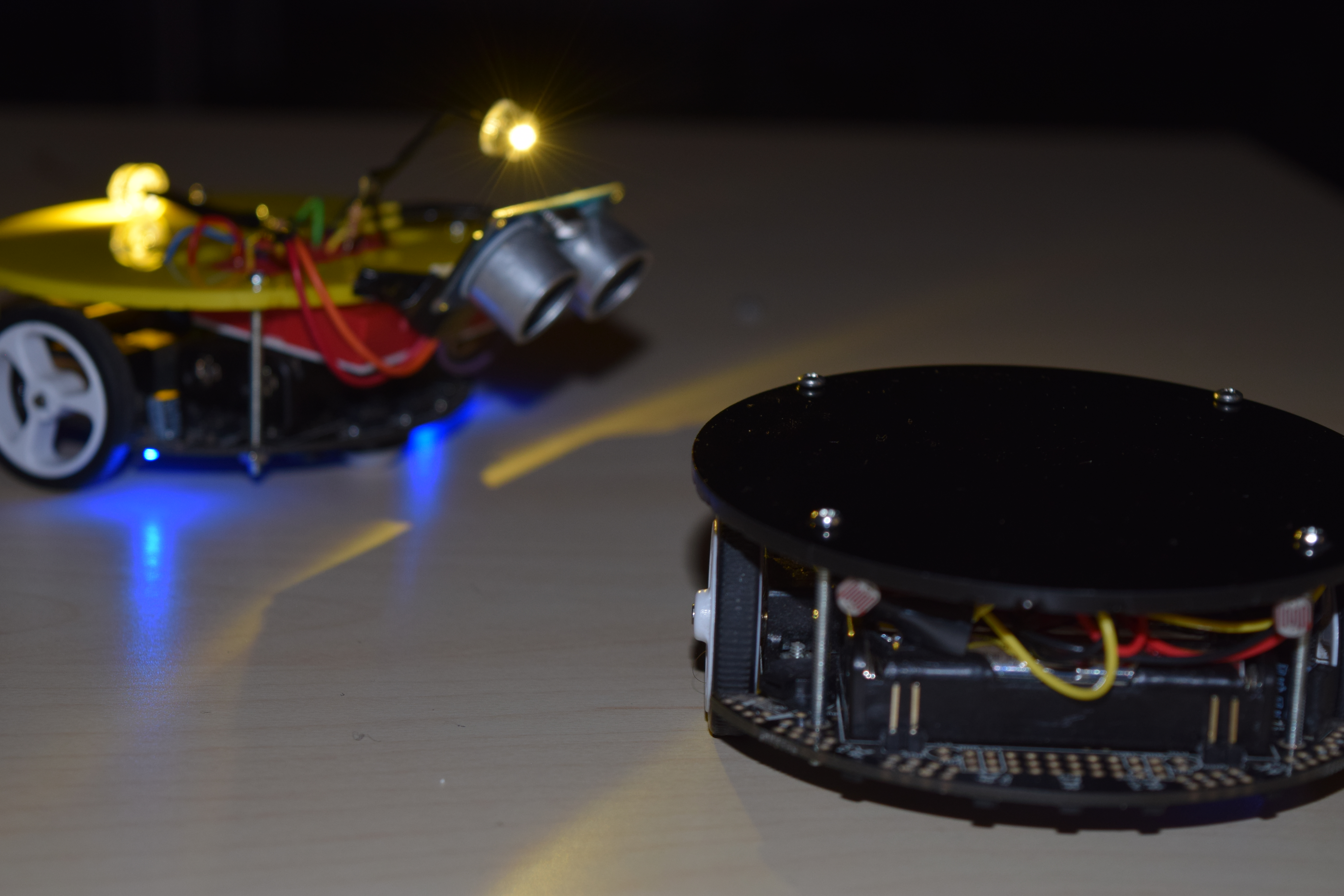
Group Members: Craig Morey & Jonathan Dyer YouTube / Jonathan Dyer – via Iframely For our first prototype we built a really cool light following robot. It uses photo resistors to sense how far it is from the light and moves to keep that distance. But once we started to think about how our robot would interact with other robots we realized that our robot is kind of obsessive about light, like what if another robot were just using light to find its way home… this robot would basically be a stalker. This was really interesting to us so we programmed another robot to help us play out this scenario. we call the light following robot “stalker” and the light emitting robot “prey”. The prey robot is equipped with lights to simulate it trying to find its way home. It is also equipped with a distance sensor so that when it realizes its being followed it turns its lights out & ” freaks out” by spinning around. Once the light goes out, the stalker bot spins around as well and acts as if it were never following the other robot. Once the “prey” bot calms down and turns the light back on, the stalker bot resumes its chase.
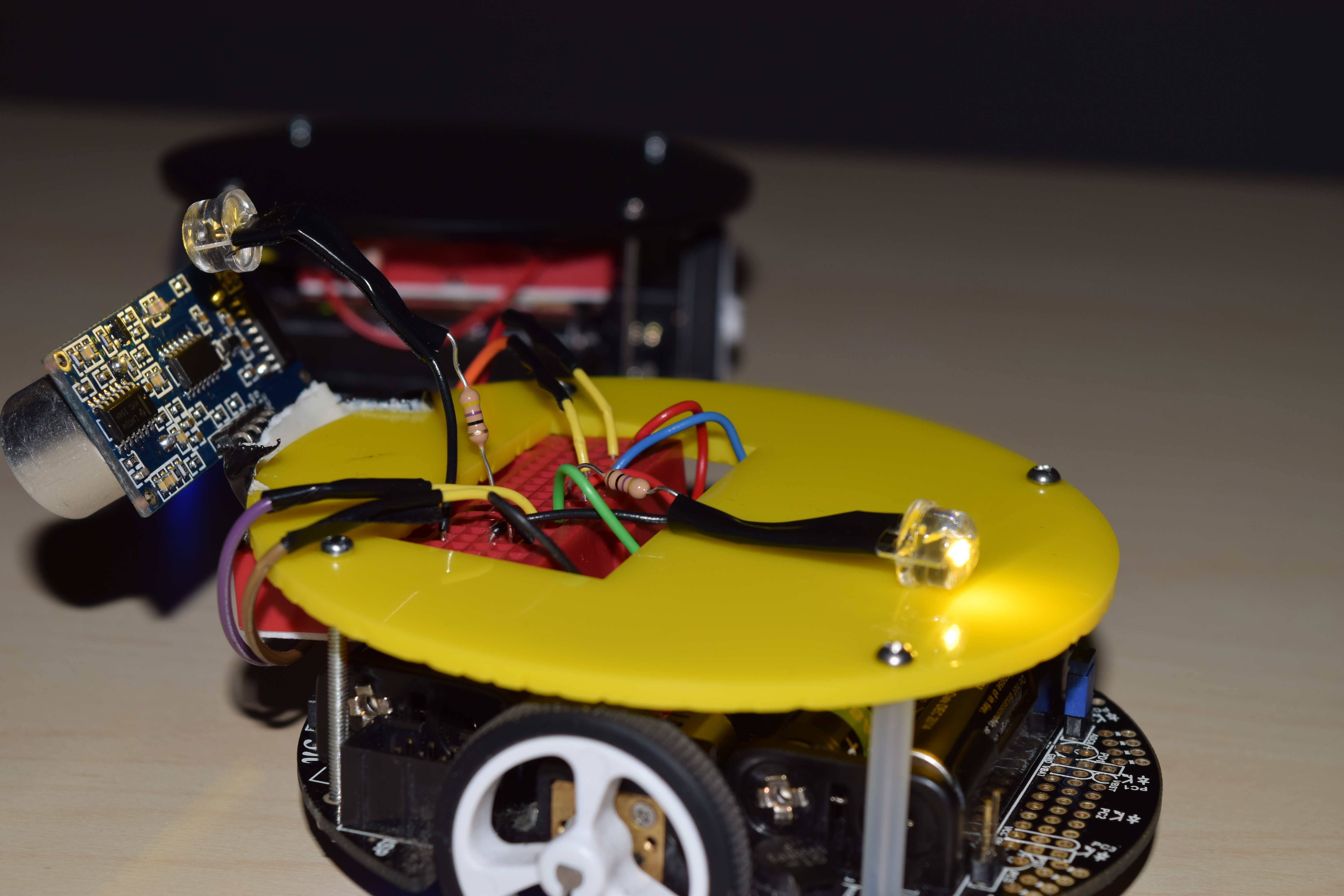
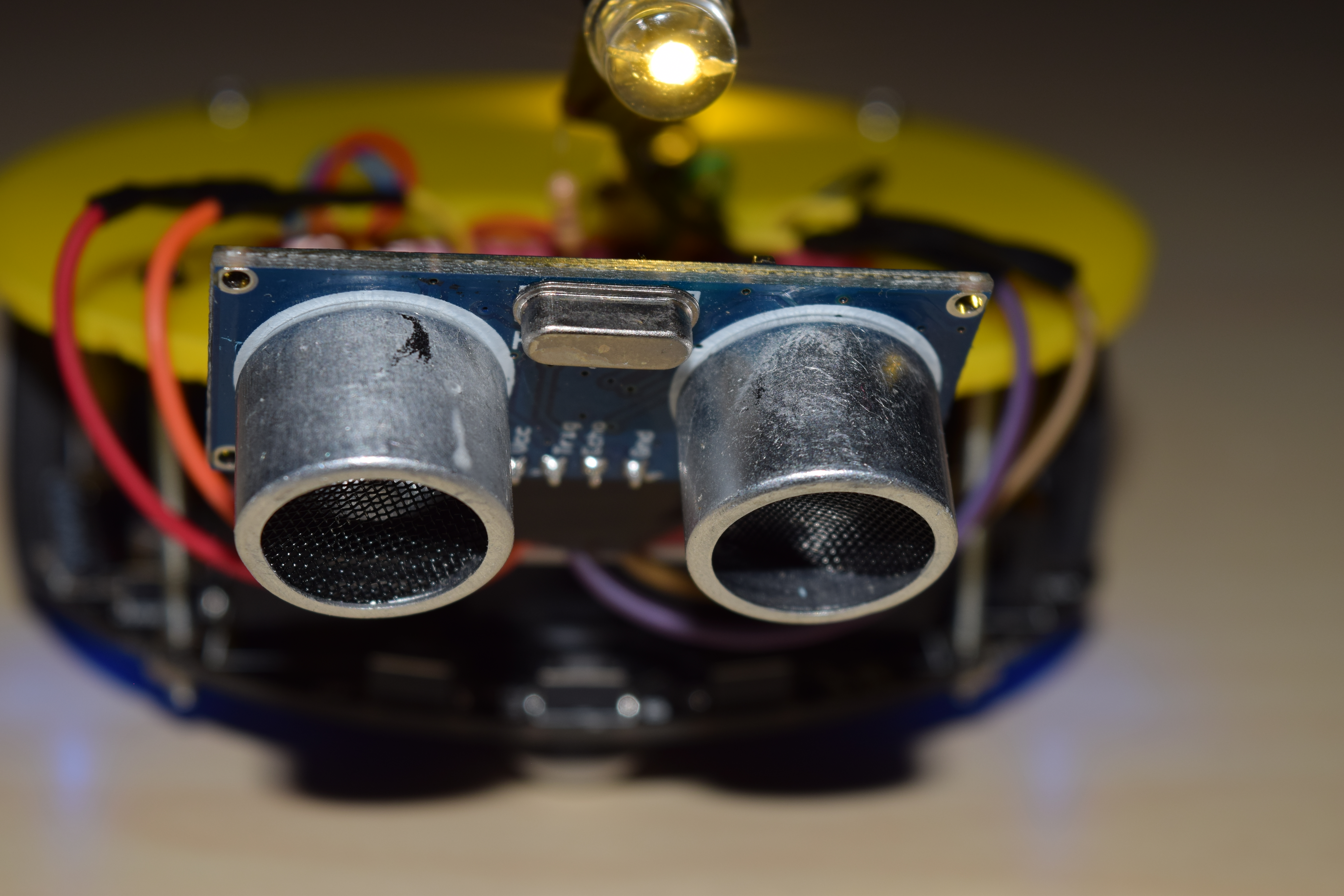
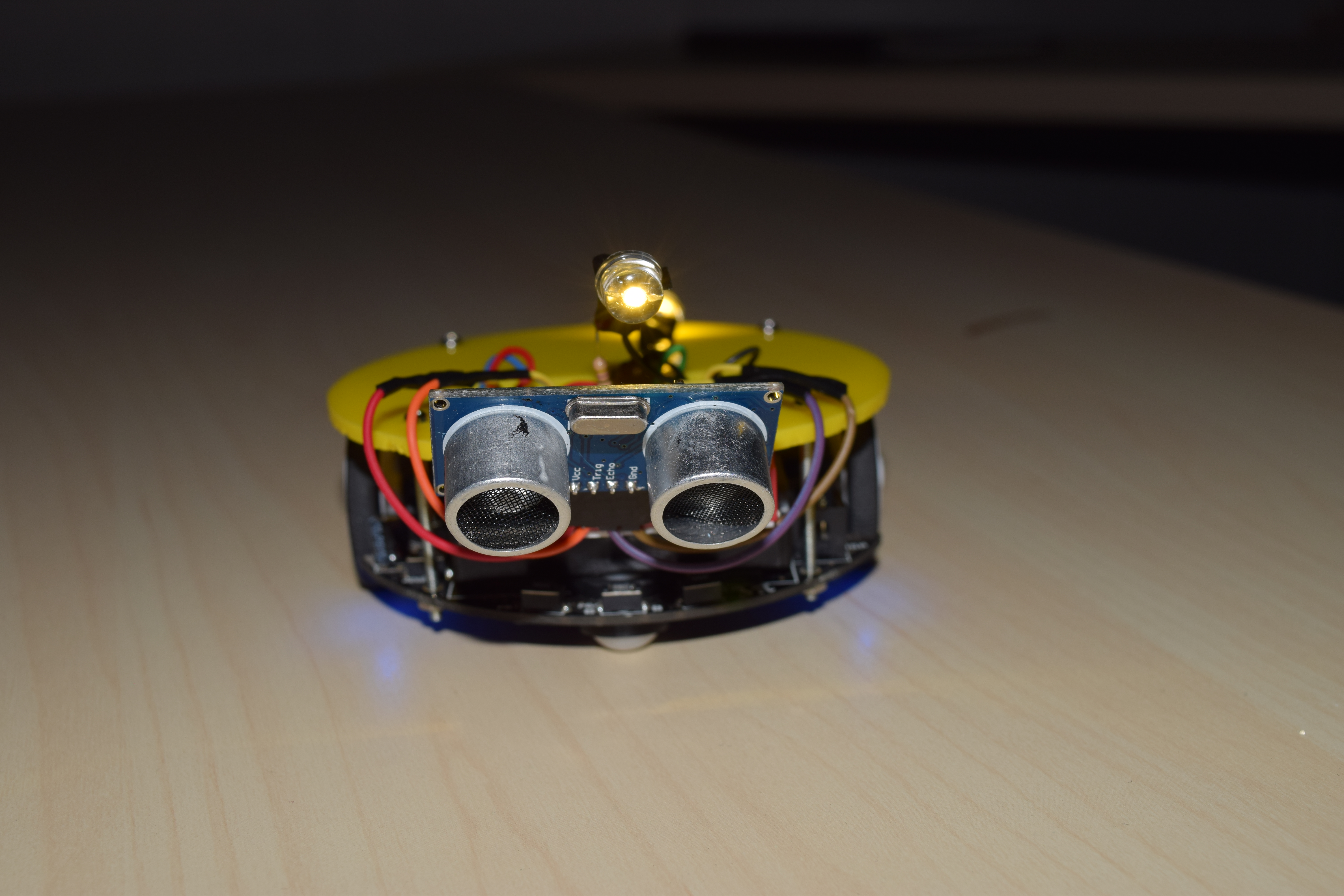
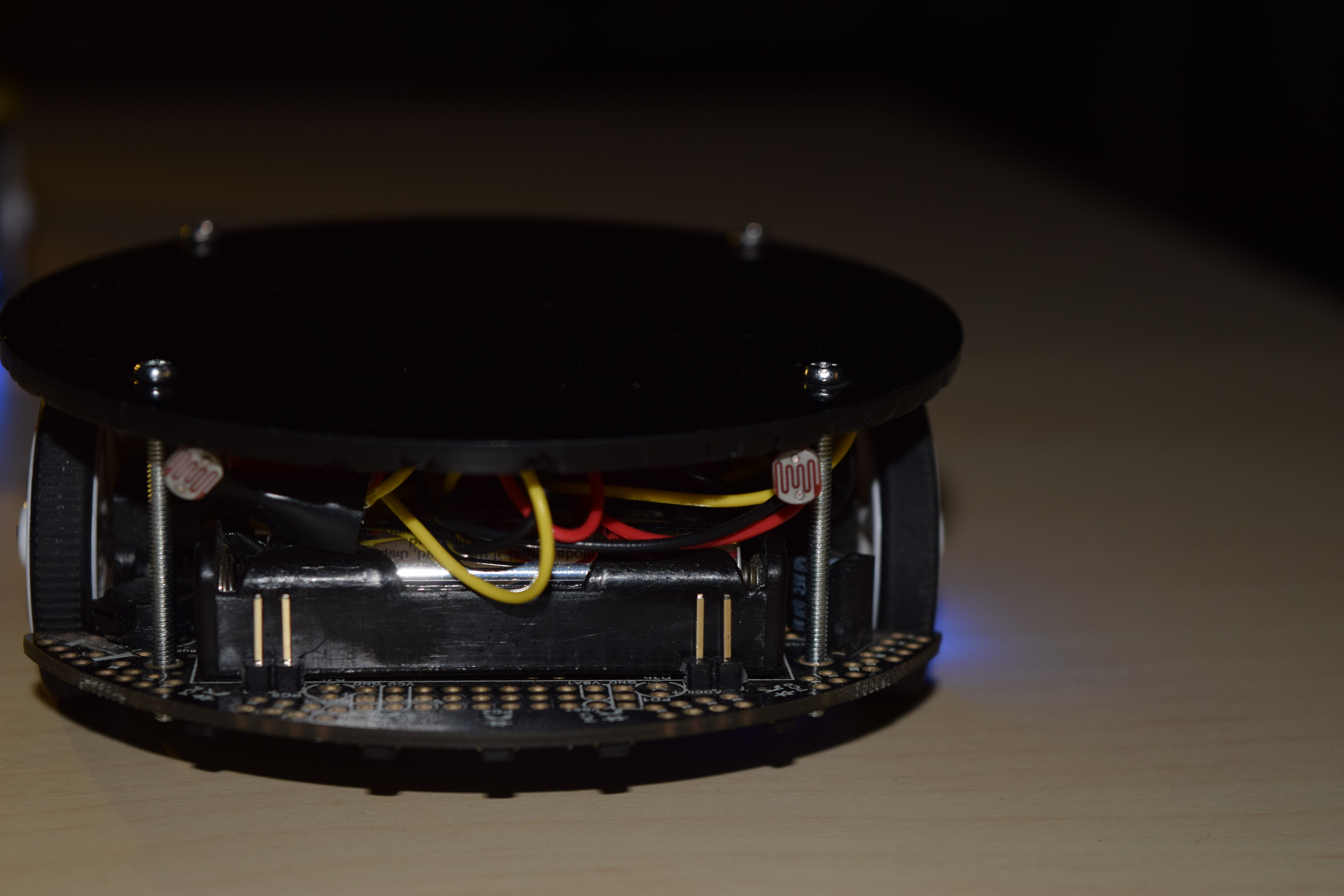
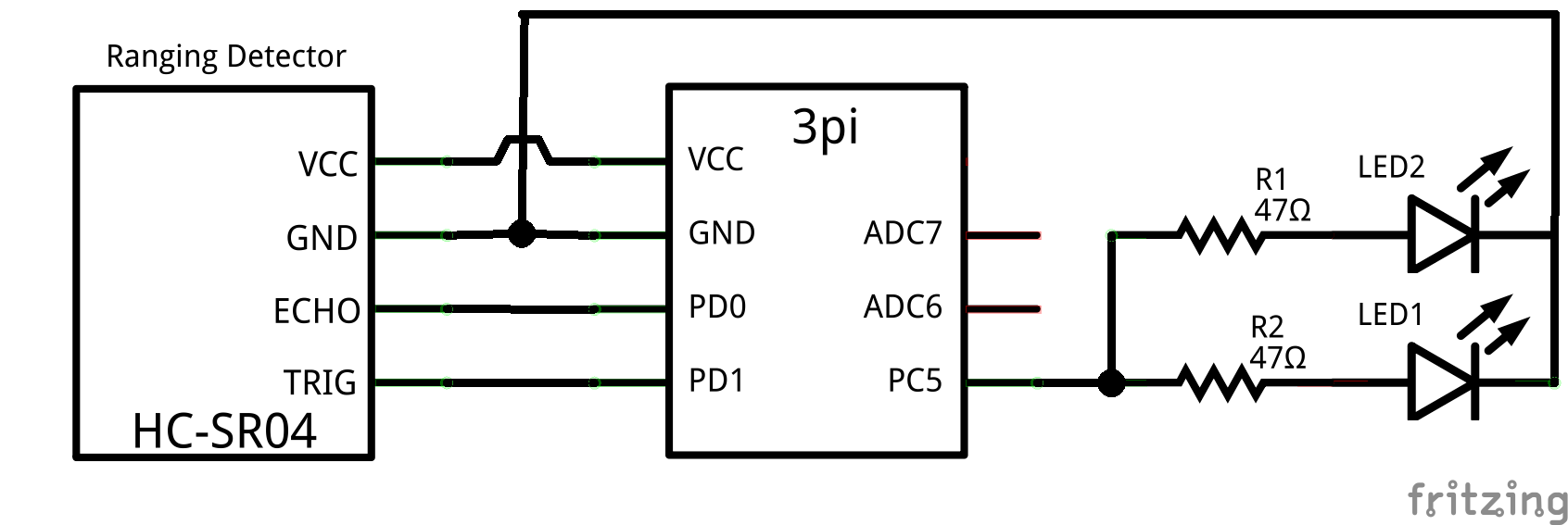
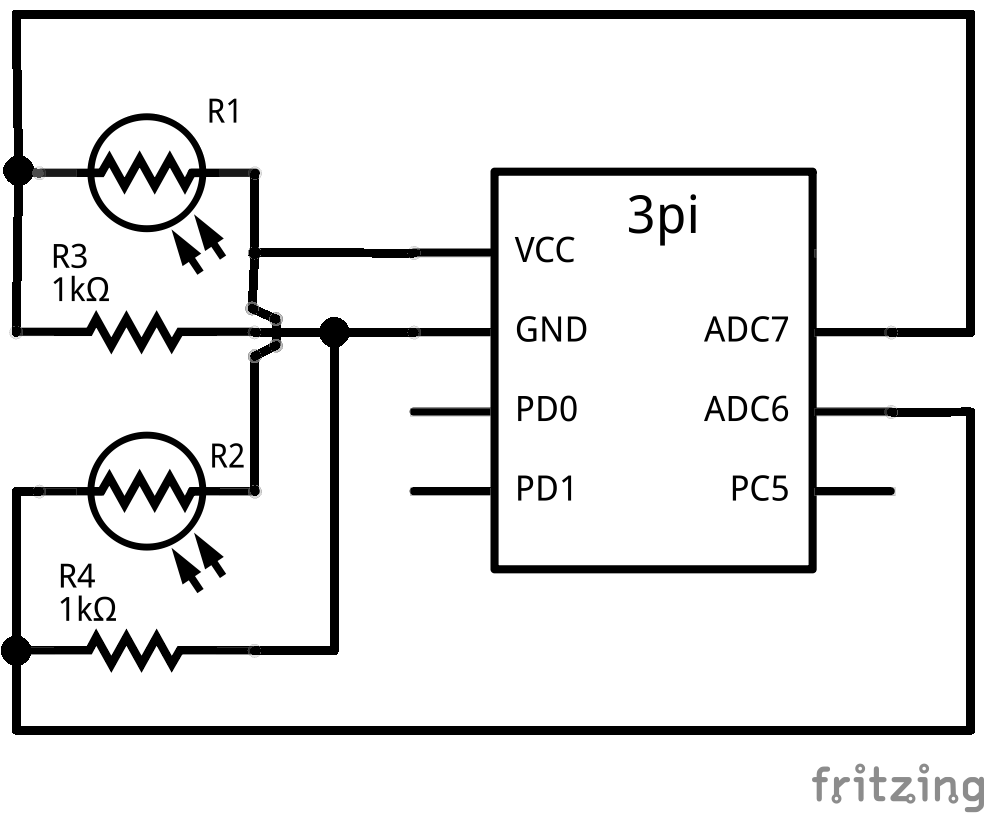
On the stalker bot, light detection is accomplished through two voltage divider circuits with photoresistors attached to two of the 3pi’s analog-to-digital-conversion pins. On the prey bot, the ultrasonic distance sensor uses two of the 3pi’s digital I/O pins to generate pulses (TRIG) and read in the pulses that result (ECHO). The prey bot’s two LEDs are wired in parallel to a third digital I/O pin.
For those interested in creating their own “stalker” and “prey” robots or maybe just using their behavior in other projects, the github links to the C++ code for the 3pi bots can be found below: Here are circuit diagrams for each robot if you’d like to wire them yourself: Prey:
Stalker:
For our final presentation, we decided to take the stalker and prey metaphor a little further by adding a social commentary about privacy in the age of social media. We attached an action figure like picture of Mark Zuckerberg to the prey bot and Edward Snowden to the stalker bot. The interaction between the two robots now symbolizes the relationship between Mark Zuckerber and Edward Snoden before Snowden revealed that he’d been part of an NSA project that used a fake Facebook server to intercept people’s information.
The most interesting part about this addition to the project was that once the robots were allowed to interact long enough, one quickly began to lose track of which robot was stalking and which was the prey. This observation elicited conversation about Snowden’s current role as a sort of vigilante exposing U.S. secrets about privacy infringements.
|