
Student Work

Autonomous Robot Part 3 – High-Five Bots
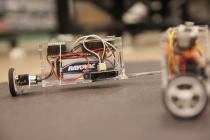
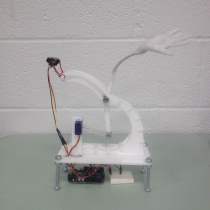
The Team Kaitlin Schaer, Rachel Ciavarella Introduction In our exploration of robot autonomy, we wished to create two simple robots that could engage in basic conversation with one another. We chose to do this through the motion of the high-five.
Autonomous Robot Part 3 – High-Five Bots
The Team Kaitlin Schaer, Rachel Ciavarella Introduction In our exploration of robot autonomy, we wished to create two simple robots that could engage in basic conversation with one another. We chose to do this through the motion of the high-five.
Autonomous Robot Part 2 – Bubble Machine Robot
Team Members: Integrator/Designer: Lauren Valley Documentation/Scribe: Maggie Burke This (2nd) Prototype: The Bubble Machine Robot is an autonomous robot that blows bubbles at five different targets arrayed in a semi-circle. The robot uses the feedback from the targets that it
Autonomous Robot Part 2 – Bubble Machine Robot
Team Members: Integrator/Designer: Lauren Valley Documentation/Scribe: Maggie Burke This (2nd) Prototype: The Bubble Machine Robot is an autonomous robot that blows bubbles at five different targets arrayed in a semi-circle. The robot uses the feedback from the targets that it
Autonomous Robot Part 2 – Marco Robo
Marco Robo Team members: Ruben Markowitz, Bryan Gardiner, Sara Johnson Introduction We are creating an automous robot that explores its surroundings, and maps its journey in attempt to understand its place in the world. Marco Robo travels until it encounters
Autonomous Robot Part 2 – Marco Robo
Marco Robo Team members: Ruben Markowitz, Bryan Gardiner, Sara Johnson Introduction We are creating an automous robot that explores its surroundings, and maps its journey in attempt to understand its place in the world. Marco Robo travels until it encounters

Autonomous Robot Part 2 – TicTok
Group Member: Horace Hou, Zac Mau Horace Hou, Zac Mau as Scribe, Designer, Integrator, Tutor, Introduction TicTok is a set of clocks which have their hands linked together by a conductive elastic. One of the clocks behave like a regular clock
Autonomous Robot Part 2 – TicTok
Group Member: Horace Hou, Zac Mau Horace Hou, Zac Mau as Scribe, Designer, Integrator, Tutor, Introduction TicTok is a set of clocks which have their hands linked together by a conductive elastic. One of the clocks behave like a regular clock
Autonomous Robot Part 2 – Waddle
Jake Scherlis- Designer, Vivian Qiu-Integrator, Myles Blodnick-Tutor, Scribe Introduction Waddle is a robot that explores the idea of an autonomous entity with an inherent personality achieved through different behaviors triggered by a variety of stimuli. Originally intended to embody an
Autonomous Robot Part 2 – Waddle
Jake Scherlis- Designer, Vivian Qiu-Integrator, Myles Blodnick-Tutor, Scribe Introduction Waddle is a robot that explores the idea of an autonomous entity with an inherent personality achieved through different behaviors triggered by a variety of stimuli. Originally intended to embody an
Autonomous Robot Part 2 – Bully Bot
Group: Kaan Doğrusöz as Tutor and Integrator, Jonathan D. Ortiz as Designer and Scribe Abstract The Bully Bot is an autonomous robot that recognizes and charges at the color red. Why We Did This Our goal was to create action
Autonomous Robot Part 2 – Bully Bot
Group: Kaan Doğrusöz as Tutor and Integrator, Jonathan D. Ortiz as Designer and Scribe Abstract The Bully Bot is an autonomous robot that recognizes and charges at the color red. Why We Did This Our goal was to create action
Autonomous Robot Part 2 – Donatello – The Turtle Bot
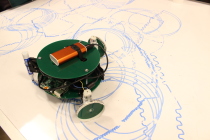
We started this project with the goal of creating a robot that makes its own art. Donatello is a simple robot designed to draw turtle graphics on whiteboard tables. Named after the teenage mutant ninja turtle, Donatello uses a two DC
Autonomous Robot Part 2 – Donatello – The Turtle Bot
We started this project with the goal of creating a robot that makes its own art. Donatello is a simple robot designed to draw turtle graphics on whiteboard tables. Named after the teenage mutant ninja turtle, Donatello uses a two DC
Autonomous Robot Part 2 – Ella and Chase
Group Members: Becca Epstein, Becca Wolfinger, Zade Delgros Roles: Becca Epstein as Tutor, Becca Wolfinger as Scribe/Integrator, Zade Delgros as Designer Introduction We have created two autonomous robots that share a common pivot to which they are constrained. They rotate about this central point
Autonomous Robot Part 2 – Ella and Chase
Group Members: Becca Epstein, Becca Wolfinger, Zade Delgros Roles: Becca Epstein as Tutor, Becca Wolfinger as Scribe/Integrator, Zade Delgros as Designer Introduction We have created two autonomous robots that share a common pivot to which they are constrained. They rotate about this central point
Autonomous Robot Part 2 – Autonomous high five machines
Kaitlin and I (Rachel) created two autonomous robots who have a conversation through high-fives. When one senses the presence of the other’s hand in range of it’s IR sensor it reacts with a high-five by actuating a servo. Video: Autonomous
Autonomous Robot Part 2 – Autonomous high five machines
Kaitlin and I (Rachel) created two autonomous robots who have a conversation through high-fives. When one senses the presence of the other’s hand in range of it’s IR sensor it reacts with a high-five by actuating a servo. Video: Autonomous

Autonomous Robot Part 2 – Acrobot
Group Members: Brian Yang and Luke Hottinger Roles: Brian Yang and Luke Hottinger as Scribes, Designers, Integrators, and Tutors Introduction The power of robotics is in creating autonomous robots that exhibit a behavior and responds to its environment. This is
Autonomous Robot Part 2 – Acrobot
Group Members: Brian Yang and Luke Hottinger Roles: Brian Yang and Luke Hottinger as Scribes, Designers, Integrators, and Tutors Introduction The power of robotics is in creating autonomous robots that exhibit a behavior and responds to its environment. This is