Corolla – the weather responsive coworking pods
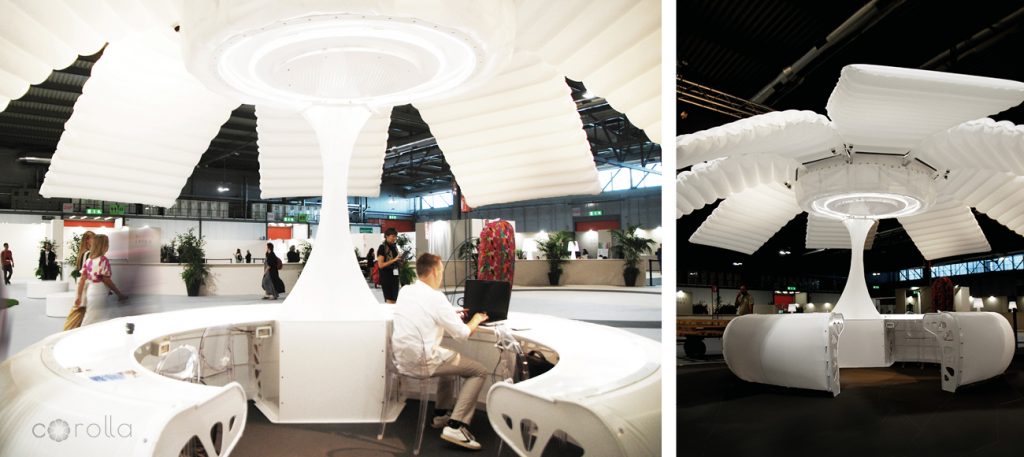

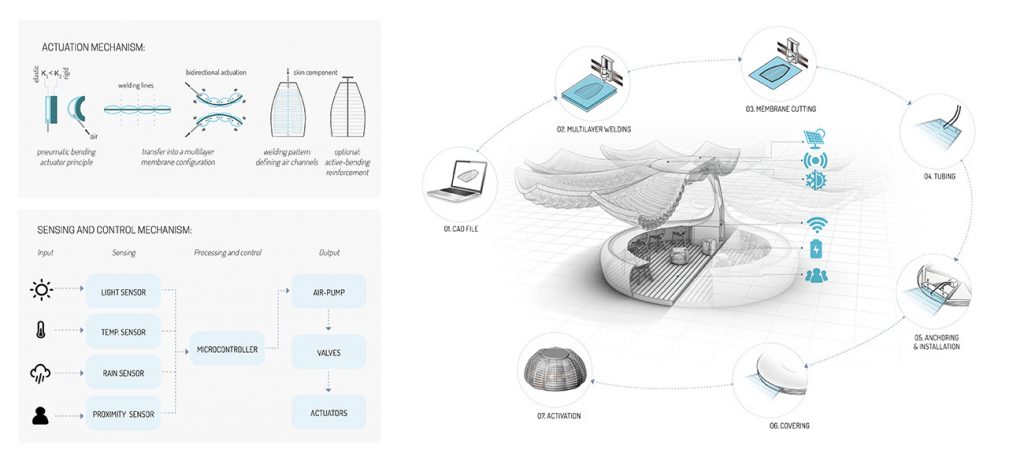
Influenced by soft-robotic principles, they used flexible materials that will be able to change to outdoor weather conditions. This co-working pod is meant to link indoor and outdoor working for all year round in any locations. The pod is made of modular steel structure which is covered by soft-robotic skin made out of 8 polyurethane pneumatic actuators. The frames are made of two internal air chambers to make it look like a petal, reflecting nature and biology. The “petals” curl up or down when the chambers are pressurized as it is activated based on weather sensors, valves, and airpumps. The pod is also equipped with a compact HVAC system for heating, cooling, WiFi, charing spots and a PV solar panel.
The Milan-based studios intends to create a more sustainable collaborative environment by adapting to its environments just like organisms. This architectural mix with design and soft robotics already uses soft materials in the overall design. Right now, only the roof of the design uses this soft robotics, so allowing the table to also be in the same material and actuate could allow this pod to be more easily moveable.
For this week, I looked into the elastomeric origami which focuses on developing a programmable paper-elastomer composites as pneumatic actuators. The soft pneumatic actuators we made of elastomers. They are inexpensive, simple to fabricate, light in weight, and easy to actuate. These soft actuators can manipulate objects like they can lift loads up to 120 times their weight. They can also be combined with other components, for example, electrical components, to increase their functionality.
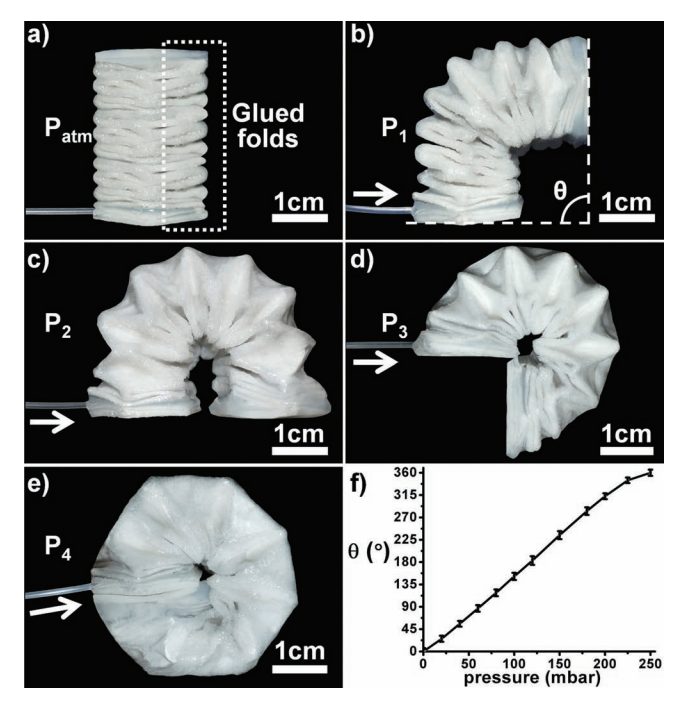
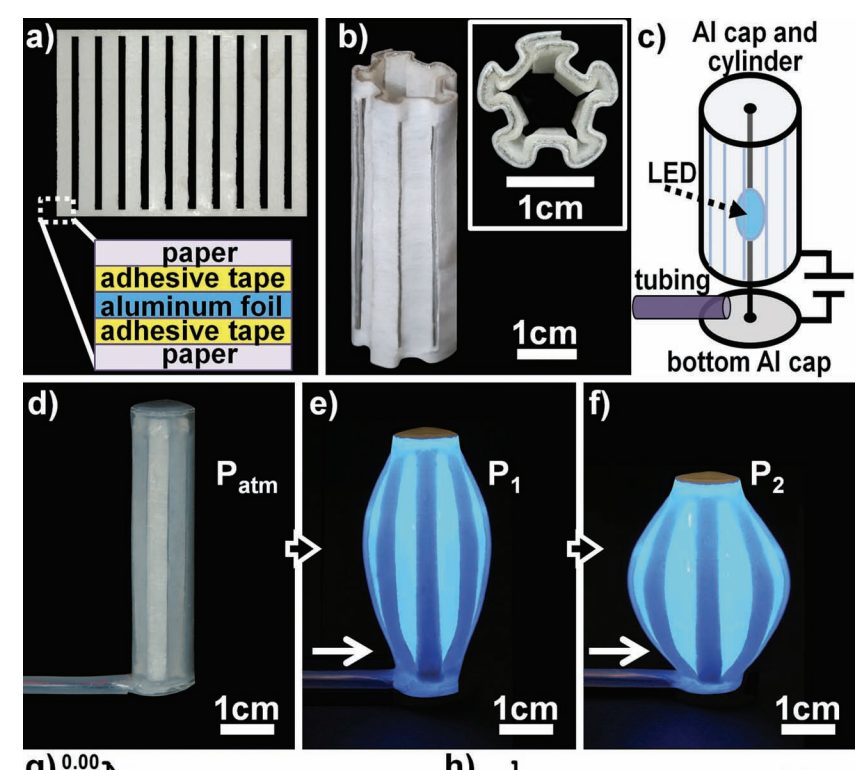
Martinez, R.V., C.R. Fish, X. Chen, and G.M. Whitesides, Elastomeric Origami: Programmable Paper-Elastomer Composites as Pneumatic Actuators. Advanced Functional Materials, 2012. 22(7): p. 1376-1384.