Revised Project Statement
The Interstellar Being project will introduce humans to a never-before-seen alien from beyond our solar system. The monochromatic color scheme of the creature is an extension of its void origins. The creature’s unique anatomy, size, and movement will serve as humanity’s first contact with another organism, that is if they choose to do so…

Creative Requirements
The Interstellar Being project would consist of a central body (6″x3″x2″) with three appendages (6″x1″x1″). The entire project would be dyed black with a shiny finish. The appendages should retain the smooth, soft texture of the silicone while the main body will have plates added to resemble armor. The plates will have a different shade of black to emphasize ruggedness and wear. The essential movements would be getting up and a defensive stance. The getting up movement would be slow and steady. As a direct contrast, the defensive stance will be fast and responsive. The minimum number of control channels required is four: one for each appendage and one for the body. The overall design language is the use of unnatural color and anatomy to incite curiosity and interactions. The specific insight that led to this revision was that tethered movement was still interesting and that touch interaction would be made more interesting with different textures.

Critical Path
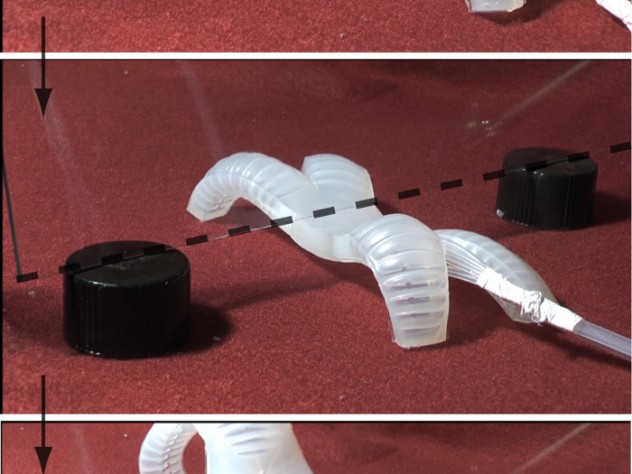
The simplest version of the system that can achieve the outlined goals would be a variation of the Whitesides Team’s starfish soft robot. Instead of having four appendages, a mold would be modified to only have three. This step may prove to be difficult, so an alternate plan would be to use the existing four-legged mold. The components of the overall system would consist of just silicone and tubing for actuation and movement. The main source would be pneumatic. The addition of wooden “scales” for the armor would be necessary in addition to the soft materials. If a more unified structure is chosen, such as the one outlined in the starfish robot, the fabrication of the central module with three valves would be the most difficult to fabricate. This also becomes the most difficult component to design, however, the references provided in the paper might make the process easier.
Proof of Concept
The main goal of the first experiment would be to create a simple system with appendages to get familiar with the constraints on movement. This goal would be achieved by finding and utilizing a model that is similar to the Whiteside Team’s and using the silicone casting methods discussed so far in class. This initial step would also answer the question about actuation. The methods researched and discussed involve pneumatic systems. It seems that these mainly rely on specialized machinery which may not be available but more accessible methods could be identified.
Resources
https://cargocollective.com/bohanh/Soft-robot-Design-and-Fabrication
Zhang, Jiawei, Andrew Jackson, Nathan Mentzer, and Rebecca Kramer. “A Modular, Reconfigurable Mold for a Soft Robotic Gripper Design Activity.” Frontiers in Robotics and AI 4 (2017). https://www.frontiersin.org/article/10.3389/frobt.2017.00046.
Zou, JiaKang, MengKe Yang, and GuoQing Jin. “A Five-Way Directional Soft Valve with a Case Study: A Starfish like Soft Robot.” In 2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE), 130–34, 2020. https://doi.org/10.1109/CACRE50138.2020.9230177.