Problem
I always find tracking the internal temperature of the things being cooked tedious . Sometimes I have to stop what I am doing to check on it, sometimes I have to look at it the whole time if the food can easily be overcooked. If I forget to check, there is a risk of overcooking and therefore bad texture and taste.
Solution
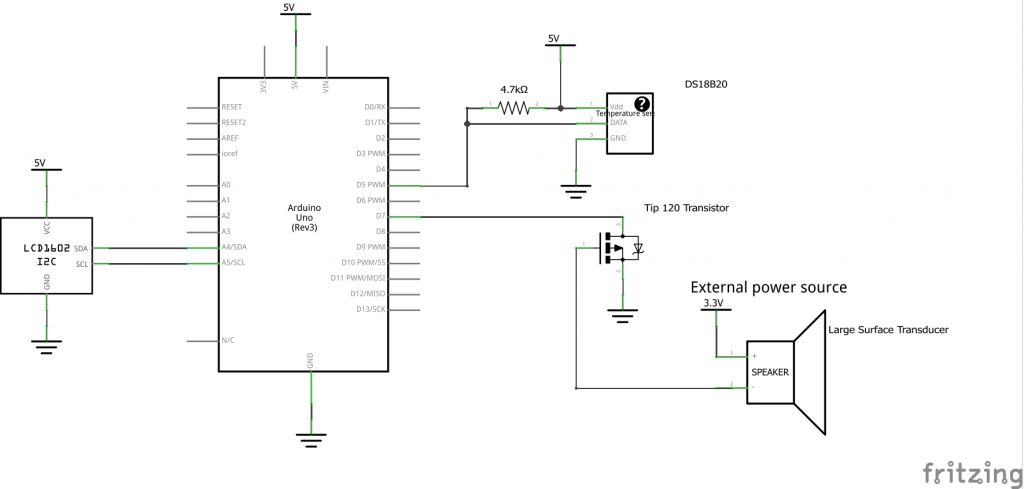
A device that actively tracks the internal temperature of the food and reminds the user when needed can solve this problem. The device is composed of a temperature sensor, a transducer speaker, and a screen. The temperature sensor of the device will be stuck into the middle of the meat or broth to measure the rate of rise in temperature.
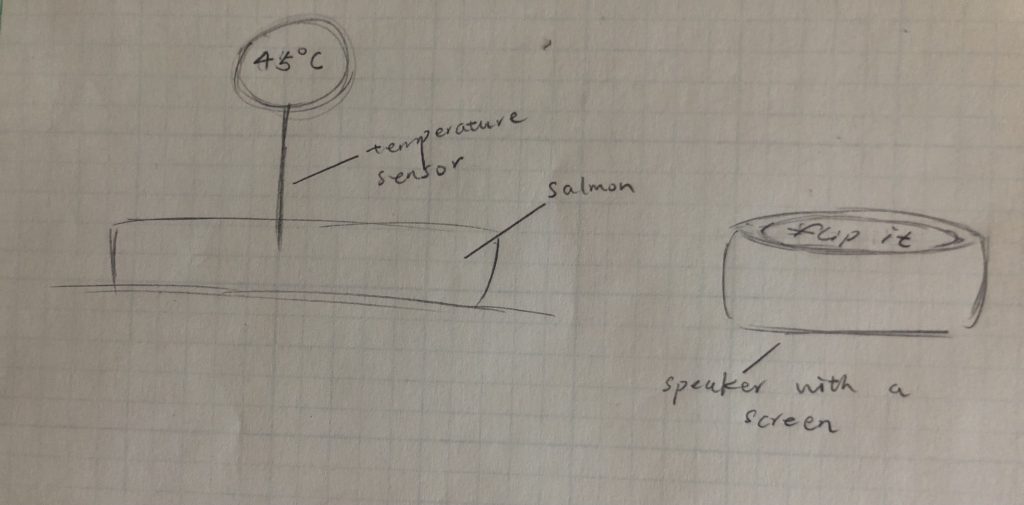
If the rising rate is too large that might lead to overcooking, the device plays “Mi Re Do” to remind the user to turn down the gas. Text will be displayed on the screen if the user needs further information. In the same fashion, if the rising rate is too small, the device plays “Do Re Mi”. The user can stop the sound by pressing the device. In addition, specific instructions can be set for different foods. For the demo, an reminder to flip the fish for stir-frying salmon comes up when the temperature reaches a specific value. The device will play a melody when the food is cooked when the temperature reaches its ideal value. However, the device will only be successful if the algorithm of the cooking temperature for different foods is well developed.
Proof of Logic
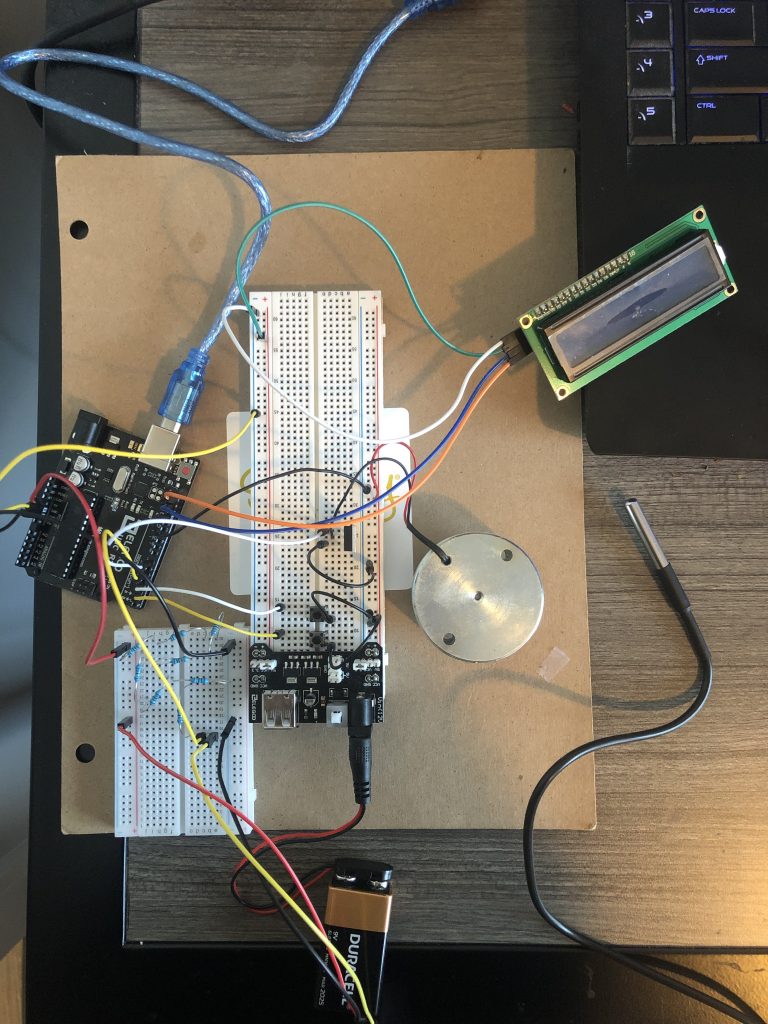
Because I am not sure if the sensor can be used on real meat, and because it will take a longer time, I changed the rate of temperature rise in each cooking stage and did a demonstration with my hand instead. I stimulate the cooking process by holding the temperature sensor and raises its temperature from room temperature (about 23 Celcius) to 32 Celcius.
//libary
#include <OneWire.h>
#include <DallasTemperature.h>
#include "pitches.h"
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
//definition
#define ONE_WIRE_BUS 5
#define SPEAKER 7
#define CONFIRM_BUTTON 2
//Attachment
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature sensors(&oneWire);
LiquidCrystal_I2C screen(0x27, 16, 2);
//Global variable
float Celcius = 0;
float Fahrenheit = 0;
float room_temp = 0;
int start_time = 0;
const bool isInterrupt = true;
bool confirmbuttonState = false;
bool isDone = false;
static const float salmon_flip_over_temp = 28; //This is the default temperature for flipping salmon
static const float done_temp = 32; //This is the temperature when the salmon is "cooked".
bool flip = false;
float last_read = 0;
float current_read = 0;
float rise_over_time = 0;
//Varibles for the timer of recording data, record data every 2 seconds
unsigned long clock_data = 0; // variable for timing
const int INTERVAL1 = 2000; // milliseconds between updates
//Functions
void read_temperature() {
sensors.requestTemperatures();
Celcius = sensors.getTempCByIndex(0);
Fahrenheit = sensors.toFahrenheit(Celcius);
Serial.print(" C ");
Serial.print(Celcius);
Serial.print(" F ");
Serial.println(Fahrenheit);
}
void ConfirmButtonPressed()
{
if (digitalRead(CONFIRM_BUTTON) == LOW) {
confirmbuttonState = true;
}
}
void temp_rise(float rise_over_time, float lowerbound, float upperbound) {
if (rise_over_time > upperbound) {
screen.clear();
screen.setCursor(3, 0);
screen.print("Turn Down");
while (confirmbuttonState == false) {
tone(SPEAKER, NOTE_E4, 200);
delay(350);
tone(SPEAKER, NOTE_D4, 200);
delay(350);
tone(SPEAKER, NOTE_C4, 200);
delay(1000);
}
confirmbuttonState = false;
screen.clear();
}
if (rise_over_time < lowerbound) {
screen.clear();
screen.setCursor(4, 0);
screen.print("Turn Up");
while (confirmbuttonState == false) {
tone(SPEAKER, NOTE_C4, 200);
delay(350);
tone(SPEAKER, NOTE_D4, 200);
delay(350);
tone(SPEAKER, NOTE_E4, 200);
delay(1000);
}
confirmbuttonState = false;
screen.clear();
}
}
//The song to play when cooking is finished
void fly_me_to_the_moon() {
tone(SPEAKER, NOTE_C5);
delay(500);
tone(SPEAKER, NOTE_B4);
delay(500);
tone(SPEAKER, NOTE_A4);
delay(500);
tone(SPEAKER, NOTE_G4);
delay(250);
tone(SPEAKER, NOTE_F4);
delay(1000);
tone(SPEAKER, NOTE_G4);
delay(250);
tone(SPEAKER, NOTE_A4);
delay(500);
tone(SPEAKER, NOTE_C5);
delay(500);
tone(SPEAKER, NOTE_B4);
delay(500);
tone(SPEAKER, NOTE_A4);
delay(500);
tone(SPEAKER, NOTE_G4);
delay(500);
tone(SPEAKER, NOTE_F4);
delay(250);
tone(SPEAKER, NOTE_E4);
delay(1250);
if (confirmbuttonState == true){
return;
}
noTone(SPEAKER);
delay(250);
tone(SPEAKER, NOTE_A4);
delay(250);
tone(SPEAKER, NOTE_G4);
delay(500);
tone(SPEAKER, NOTE_F4);
delay(500);
tone(SPEAKER, NOTE_E4);
delay(250);
tone(SPEAKER, NOTE_D4);
delay(1000);
tone(SPEAKER, NOTE_E4);
delay(250);
tone(SPEAKER, NOTE_F4);
delay(500);
tone(SPEAKER, NOTE_A4);
delay(250);
tone(SPEAKER, NOTE_F4);
delay(250);
tone(SPEAKER, NOTE_GS4);
delay(750);
tone(SPEAKER, NOTE_F4);
delay(500);
tone(SPEAKER, NOTE_E4);
delay(500);
tone(SPEAKER, NOTE_D4);
delay(250);
tone(SPEAKER, NOTE_C4);
delay(1750);
noTone(SPEAKER);
delay(1000);
}
//This function is called when the "salmon" option is selected
void stirfry_salmon() {
//check the rate of temperature rise every 2 seconds
if (millis() >= clock_data) {
sensors.requestTemperatures();
Celcius = sensors.getTempCByIndex(0);
current_read = Celcius;
rise_over_time = (current_read - last_read) / 2;
//Print information onto the lcd screen
int minute = (millis() - start_time) / 60000;
int second = (millis() - 60000 * minute) / 1000;
//Serial.print(minute);
//Serial.println(second);
screen.setCursor(0, 0);
screen.print("Salmon");
screen.setCursor(0, 1);
screen.print((String)"Temp:" + current_read + "C");
screen.setCursor(7, 0);
screen.print((String)"Time:" + minute + ":" + second);
//Check whether it is time to flip the fish
if (current_read >= salmon_flip_over_temp && flip == false) {
screen.clear();
screen.setCursor(6, 0);
screen.print("Flip");
screen.setCursor(7, 1);
screen.print("it");
while (confirmbuttonState == false) {
tone(SPEAKER, NOTE_C5, 200);
delay(350);
tone(SPEAKER, NOTE_B4, 200);
delay(350);
tone(SPEAKER, NOTE_A4, 200);
delay(350);
tone(SPEAKER, NOTE_G4, 200);
delay(350);
tone(SPEAKER, NOTE_A4, 200);
delay(350);
tone(SPEAKER, NOTE_B4, 200);
delay(350);
tone(SPEAKER, NOTE_C5, 200);
delay(1000);
}
confirmbuttonState = false;
screen.clear();
flip = true;
}
//Checked if the fish is already cooked
if (current_read >= done_temp) {
screen.clear();
screen.setCursor(5, 0);
screen.print("Cooked");
while (confirmbuttonState == false) {
fly_me_to_the_moon();
}
confirmbuttonState = false;
screen.clear();
isDone = true;
return;
}
//Every cooking stage has a different "standard" rate of temperature rise
//0-10s The first stage of cooking
if (millis() - start_time <= 10000) {
temp_rise(rise_over_time, 0.12, 0.7);
}
//10-16s The second stage of cooking
if (millis() - start_time > 10000 && millis() - start_time <= 16000 ) {
temp_rise(rise_over_time, 0.12, 0.19);
}
//16-24s The third stage of cooking
if (millis() - start_time > 16000 && millis() - start_time <= 24000 ) {
temp_rise(rise_over_time, 0.6, 0.9);
}
//>24s The fourth stage of cooking
if (millis() - start_time > 10000 && millis() - start_time <= 16000 ) {
temp_rise(rise_over_time, 0, 0.3);
}
last_read = current_read;
clock_data = millis() + INTERVAL1 ;
//Serial.print(Celcius);
//Serial.print(" ");
Serial.print(current_read);
Serial.print(" ");
Serial.println(rise_over_time);
}
}
void setup()
{
//Initialization
Serial.begin(9600);
sensors.begin();
screen.init();
screen.backlight();
//Setting the pinMode
pinMode(CONFIRM_BUTTON, INPUT_PULLUP);
//Attach interrupt
if (isInterrupt) {
attachInterrupt (digitalPinToInterrupt(CONFIRM_BUTTON), ConfirmButtonPressed, FALLING);
}
//Record the room temperature
sensors.requestTemperatures();
Celcius = sensors.getTempCByIndex(0);
room_temp = Celcius;
last_read = room_temp;
//test-field
//tone(SPEAKER, NOTE_A4,200);
//screen.setCursor(0, 1);
//screen.print("2nd row text");
start_time = millis();
}
void loop(void)
{
if (isDone == false) {
stirfry_salmon();
}
}