Rachel Nakamura, Lauren Valley, Erin O’Neill
For our first project, we decided to do our best to create a small robot that would trace whatever object was placed on the table next to it. We thought that this would be a good way to explore simple sensors, and this prompt held the most appeal for us as a group.
We first did some sketches of how we would arrange the sensors, servos, pen, and batteries.
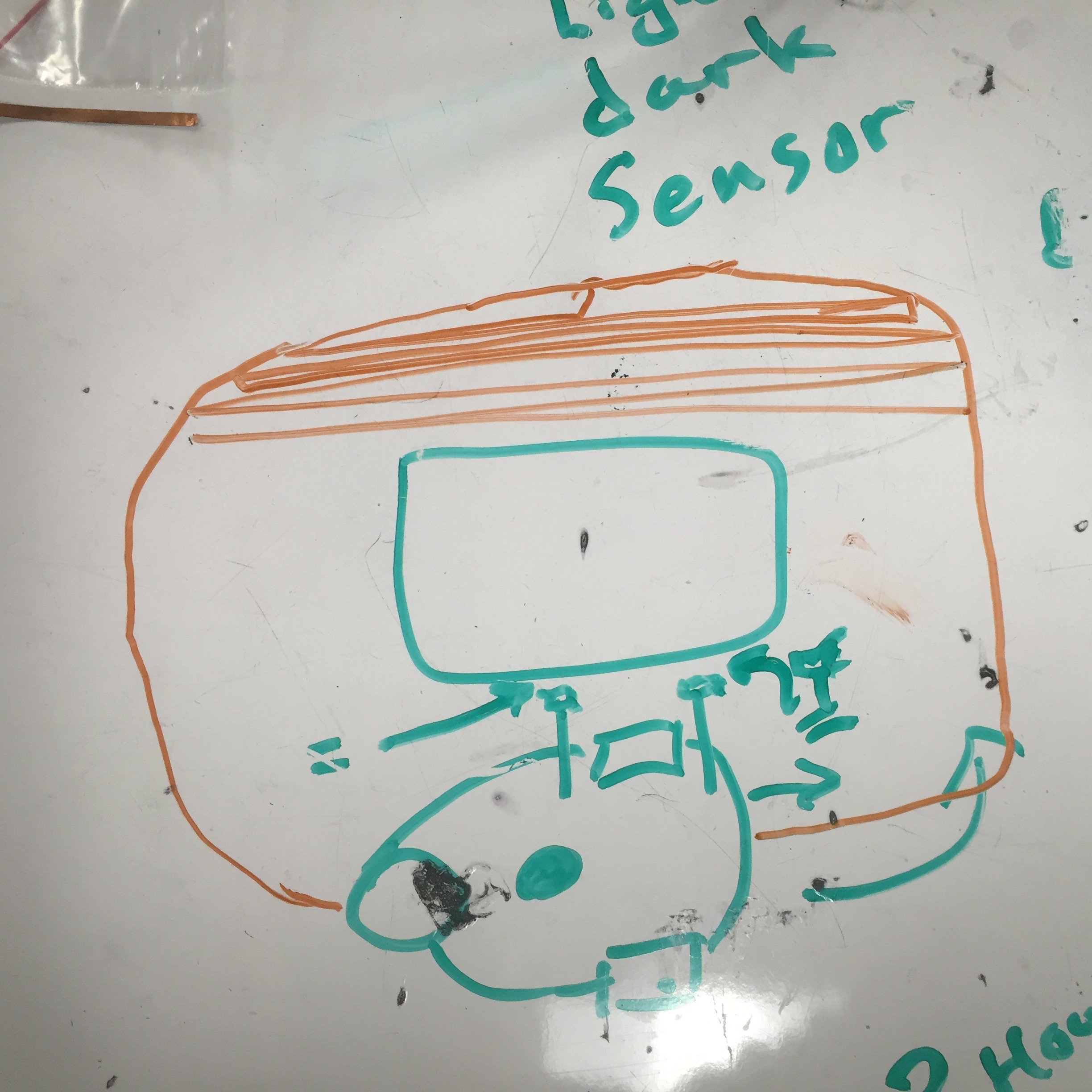
Below you can see a draft of what we hypothesized the base plate of the robot would look like. We thought it would be easiest to model our design after the 3pi, which has two wheels and a third “roller” that stands in as the third leg of the bot.
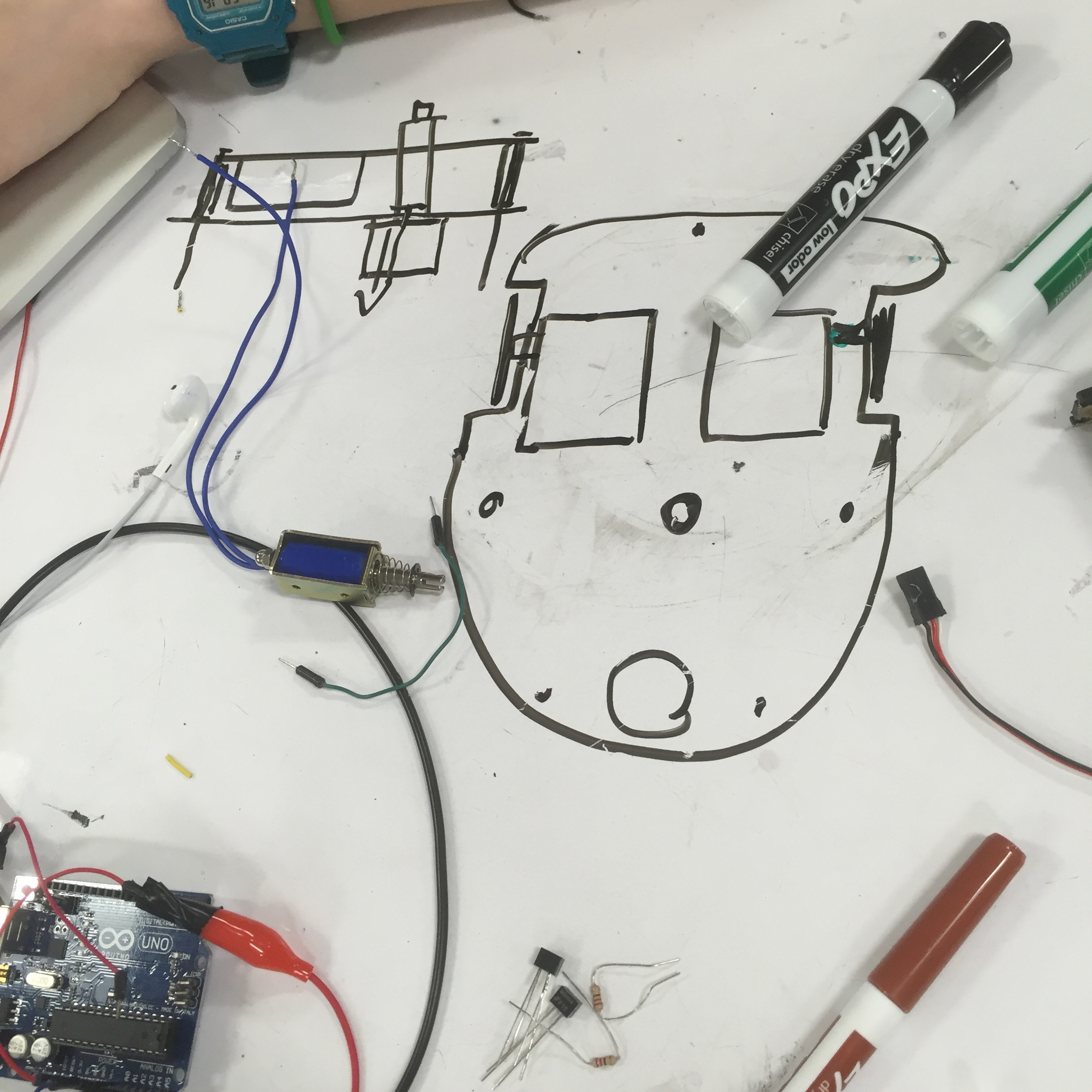
Below is our process for deciding how we would actuate the motion of the marker/drawing utensil up and down.
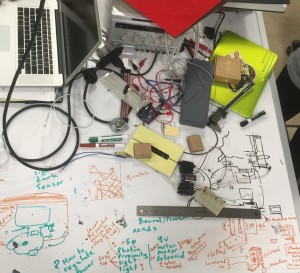
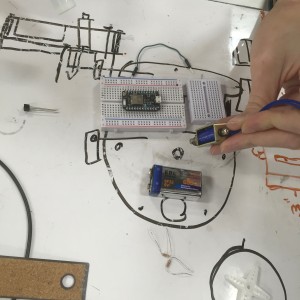
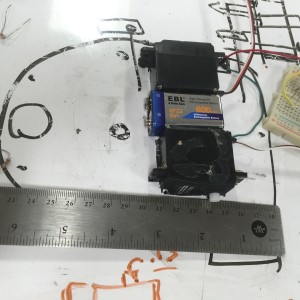
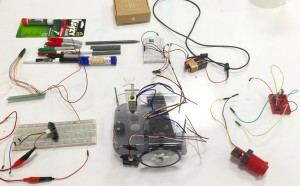
We laid our largest items out beforehand in order to get a sense of how spacing and sizing should work in order to make sure all of the necessary components, like the batteries, servos, breadboards, and Photon, would fit within our bot.
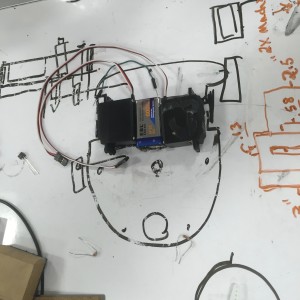
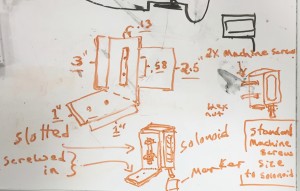
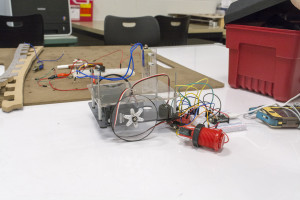
We then had to figure out how to arrange the solenoid, since that was how we planned to move the marker up and down initially. This was prior to us deciding to just keep the marker in the down position so that way we would at least have a functioning robot.
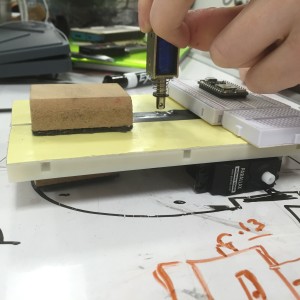
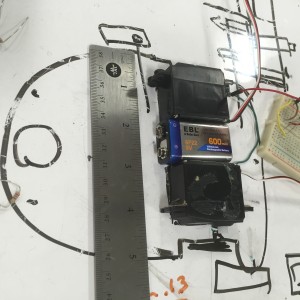
Here, we’re deciding what height at which to put the solenoid and what distance to place it with regards to the circuitry, motors, and batteries.
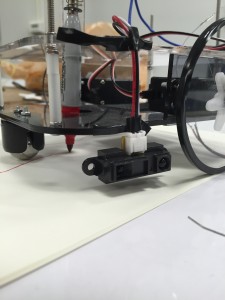
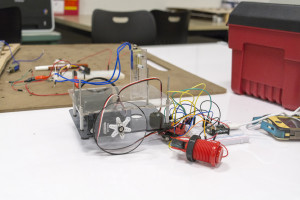
Lauren whipped up an excellent prototype using laser cut acrylic. We used electrical tape on the wheels because rubber bands would not hold on the wheel.
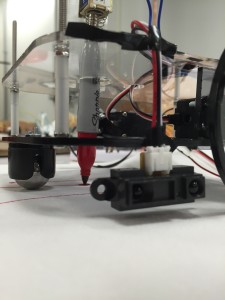
Here, we’re testing how well the mini Sharpie works for what we need to do. We’ve also attached the IR sensors at this point so that the robot can figure out if it is, in fact, at an edge.
As we discovered the hard way, programming with the Particle Photon was more trouble than we anticipated. We went ahead with an Arduino while I continued to debug the Photon.
Though the Arduino ended up working, we did figure out eventually that the Photon’s failure was not a hardware one, but a software bug where we did not terminate our while loops.
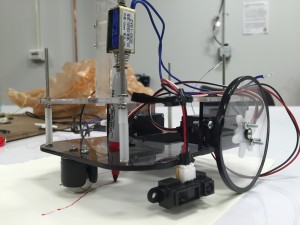
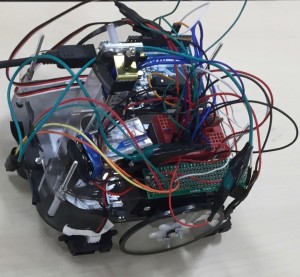
Below is what the bot moved like as an object.
And below, you can see some successful traces of a roll of tape.
The first video shows the robot tracing, sped up 2x in order to make viewing a little easier.
A video below shows a short clip of the robot in motion.
As Erin explained in a previous post:
EXPLAINED: Tracerbot will circle while tracing on paper a object placed next to it. It utilizes a Spark Photon kit, cut out plexi sub-structure, wheels, 9v batteries, sensors and more. It detects a objects shape and leaving a outline of it.
CHOSEN: We chose this project because utilizing multiple seniors to mimic a 3D object connected all our skill sets in a unique wholistic way. With our group interests we hoped to learn the process and explore a fresh way to abstractly copy a 3D object.
CRITIQUED: Tracerbot is in the works with almost all issues resolved to trace. The functional plexiglass framework is a great way to elegantly arrange and practically facilitate the mechanical parts needed for adjustable forward movement, engaging the marker, and sensing the object. The Photon code was looping incorrectly, then solved. There are many practical applications that can be expanded from this prototype for industrial use, mapping dangerous environments or just a mechanical robot duplication in real 3D time with a physical result. If we were to change or improve/advance a larger hole for multiple size markers would add versatility. We hope to bring it to the next level by filling in the outline in a elegant way.The loop closure is a little clunky and when solved will offer great opportunities for more accurate duplication. Fine art making may also be an exciting application.
RELATED: Our project excited us, as it will give visual indicators (trace) of a object after it has been removed, like a opposite sunburn or snow angel or persons outline on paper. The many ‘fill in’ solutions i.e.. zig zag, random until filled, and spiral; brought to mind how robot vacuums utilize sensors and creatively trouble shoot the best way to fill in the traced shape.
Leave a Reply