Page 3 of 5
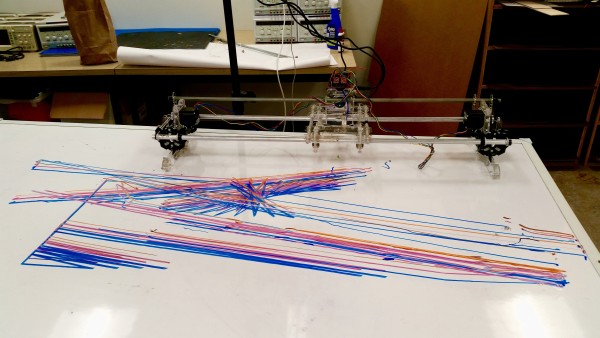
Abstract The AlgoBot is a wheeled robot that draws an algorithmic pattern with dry erase markers. The prototype is based on the design of an industrial CNC machine. Using a gantry system for movement in the x-direction and custom cut… Continue Reading →
If you’ve developed code for the photon, you know how annoying the necessity to develop and compile code in the “particle cloud.” Every time you have to make a change, you have to: upload your code wait for it to… Continue Reading →
Rachel Nakamura, Lauren Valley, Erin O’Neill For our first project, we decided to do our best to create a small robot that would trace whatever object was placed on the table next to it. We thought that this would be… Continue Reading →
Explained: It’s structure is simple: a flat bed suspended from its corners by wire so that it can smoothly swing, and a single arm that firmly presses a marker on a sheet of paper (drawing as the bed oscillates). Chosen: The drawing… Continue Reading →

2 DOF Plotting Robotic Arm – Arduino Platform Created by Gregory Bourke EXPLAINED: This robot is a simple 2-d control system that can draw out inputs from a computer onto paper like a printer. There is a joint in the mechanism that… Continue Reading →
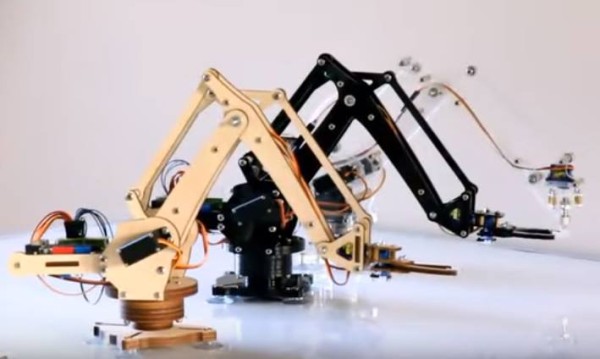
uArm Robot Arm Powered By Arduino Created by the UFad group EXPLAINED: This is a robot arm that is able to to move in 3 dimensions and swivel. It is modeled after a manufacturing robot and can pick objects up and… Continue Reading →
EXPLAINED: A sumo robot who uses extreme speed to knock its opponent out of the ring. CHOSEN: I chose this robot because it has very good documentation and because it is one of the many sumo bots that use extreme speed… Continue Reading →
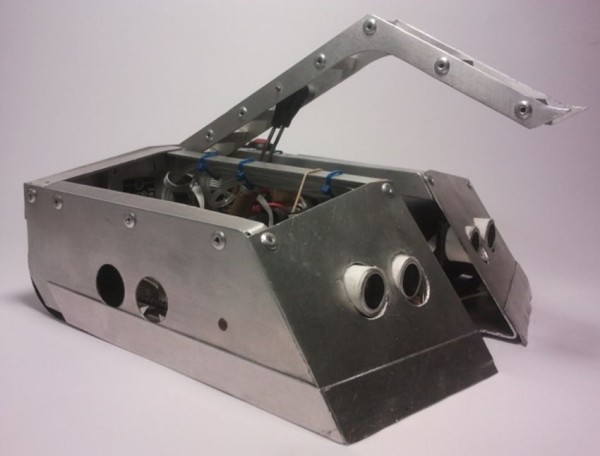
EXPLAINED: A sumo robot that uses a flipper to help get its opponents out of the ring. CHOSEN: I chose this robot because it is one of the few small sumo robots to use an attack besides ramming to get their opponent… Continue Reading →

OBJECTIVE Make a sensor from a microphone that measures/detects an environmental condition that is not an audio source. You must convert some other physical energy (displacement, light, electricity, heat) to sound to be sensed by your microphone : DETAILS The first week… Continue Reading →
Process Abstract Sumo Bots are a pair of miniature robots looking to wipe the opponent out of a small arena. Inspired by a conglomerate of robots that are put in combat with each other, these Sumo Bots are… Continue Reading →