Code
/*
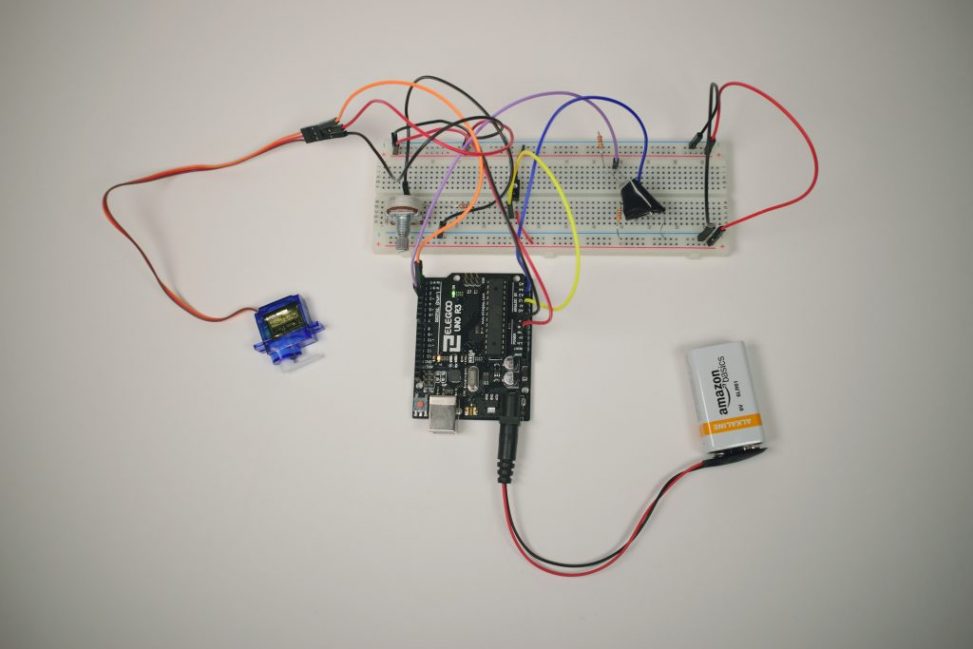
Double Transducer: Proximity to Light to Angle
Kaitlin McTigue, Nathan Naylor
This code
1. Mesures distance with an IR sensor
2. Maps that distance to a scale of 0-5
3. Lights an LED with brightness based on the IR value
4. Uses a photoreceptor to measure the amount of light emitted by the LED
5. Maps that light value to a number between 1 and 170
6. Spins a servo to that angle
The angle of the servo represents the closeness of an object to the IR sensor!
Inputs:
1 IR proximity sensor
1 photoreceptor
1 potentiometer
Outputs:
1 LED
1 servometer
Serial Monitor Feedback
*/
#include <Servo.h>
const int LEDPIN = 3; //digital
const int PHOTOPIN = A1; //analog
const int IRPIN = A0; //analog
Servo outservo;
void setup() {
outservo.attach(2); // attaches the servo on pin
pinMode(IRPIN, INPUT);
pinMode(LEDPIN, OUTPUT);
pinMode(PHOTOPIN, INPUT);
Serial.begin(9600); // Open serial monitor at 9600
}
void loop() {
delay(50);
int irVal = analogRead(IRPIN); //read distance
int ledVal = map(100, 500, irVal, 0, 5); //convert IR input to a scale 0 to 5 volts
analogWrite(LEDPIN, ledVal); //brighten LED as IR distance is closer
int photoVal = analogRead(PHOTOPIN); //red LED brightness
int servoVal = map(400, 500, photoVal, 170, 0); //convert photoreceptor input to a scale of 170 to 0
outservo.write(servoVal); //move servo between 0 and 170 degrees
}
Comments are closed.