
Graded Projects
Final Project Sketch – Superpower – Wrecking Ball
Our project will display data in an easily viewable and interesting way. We will have a grid of ping pong balls on a fan (each being able to move in the vertical direction up and down). We will pull information
Final Project Sketch – Superpower – Wrecking Ball
Our project will display data in an easily viewable and interesting way. We will have a grid of ping pong balls on a fan (each being able to move in the vertical direction up and down). We will pull information
Final Project Sketch – KineControl Modular Music
By Maggie Burke & Daniel Hua The KineControl is a modular device worn on the ankles and wrists used to control different parameters of music. Each band will contain a LightBlue Bean, an infrared light emitter strip, an infrared light
Final Project Sketch – KineControl Modular Music
By Maggie Burke & Daniel Hua The KineControl is a modular device worn on the ankles and wrists used to control different parameters of music. Each band will contain a LightBlue Bean, an infrared light emitter strip, an infrared light
Autonomous Robot Part 3 – Destroying Search
Introduction Sometimes, things just don’t work out. This project was a second iteration of our earlier project, an autonomous robot named Search. It never came to full fruition. For this second iteration the robot’s behavior was modeled to explore
Autonomous Robot Part 3 – Destroying Search
Introduction Sometimes, things just don’t work out. This project was a second iteration of our earlier project, an autonomous robot named Search. It never came to full fruition. For this second iteration the robot’s behavior was modeled to explore
Autonomous Robot Part 3 – Tapeworm
Team Members: Miles Peyton, Jeffrey Houng Introduction: In this age of robots becoming smarter and smarter, where they are starting to emulate living and natural behavior, we wanted to create an autonomous robot that exemplified organic and natural movement. Through
Autonomous Robot Part 3 – Tapeworm
Team Members: Miles Peyton, Jeffrey Houng Introduction: In this age of robots becoming smarter and smarter, where they are starting to emulate living and natural behavior, we wanted to create an autonomous robot that exemplified organic and natural movement. Through

Autonomous Robot Part 3 – Raphael – The Turtle Bot
Raphael is the successor to Donatello the drawing robot. The goal of the Turtle bot project is to create a robot that can create its own works of art. Just like Donatello, Raphael drives around on a whiteboard table
Autonomous Robot Part 3 – Raphael – The Turtle Bot
Raphael is the successor to Donatello the drawing robot. The goal of the Turtle bot project is to create a robot that can create its own works of art. Just like Donatello, Raphael drives around on a whiteboard table
Autonomous Robot Part 3 – Fire Bubble Machine
For the third iteration of the Bubble Project we took the reaction the audience had to the presentation of our last iteration and ran with it. The rest of the class was intrigued and excited by the mess of soapy
Autonomous Robot Part 3 – Fire Bubble Machine
For the third iteration of the Bubble Project we took the reaction the audience had to the presentation of our last iteration and ran with it. The rest of the class was intrigued and excited by the mess of soapy

Autonomous Robot Part 3 – Bully Bot
Group: Kaan Doğrusöz as Tutor and Integrator, Jonathan D. Ortiz as Designer and Scribe Abstract The Bully Bot is an autonomous robot that recognizes and charges at the color red until it gores, or until it and idles in pseudo-random
Autonomous Robot Part 3 – Bully Bot
Group: Kaan Doğrusöz as Tutor and Integrator, Jonathan D. Ortiz as Designer and Scribe Abstract The Bully Bot is an autonomous robot that recognizes and charges at the color red until it gores, or until it and idles in pseudo-random
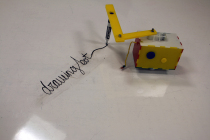
Autonomous Robot Part 3 – Drawing Bot
Group Members: Aditi Sarkar, Alice Borie, Claire Hentschker Designer: Aditi Sarkar, Claire Hentschker, and Alice Borie as Integrators, Designers, Tutors, and Scribes Introduction We wanted to create an autonomous drawing robot that altered its drawing in response to lines it
Autonomous Robot Part 3 – Drawing Bot
Group Members: Aditi Sarkar, Alice Borie, Claire Hentschker Designer: Aditi Sarkar, Claire Hentschker, and Alice Borie as Integrators, Designers, Tutors, and Scribes Introduction We wanted to create an autonomous drawing robot that altered its drawing in response to lines it
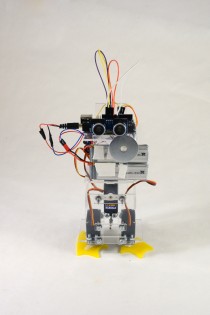
Autonomous Robot Part 3 – Waddle
Vivian Qiu – Scribe, Jake – Designer, Myles – Tutor Introduction Waddle is a robot that explores the idea of an autonomous entity with an inherent personality achieved through different behaviors triggered by a variety of stimuli. Originally intended to
Autonomous Robot Part 3 – Waddle
Vivian Qiu – Scribe, Jake – Designer, Myles – Tutor Introduction Waddle is a robot that explores the idea of an autonomous entity with an inherent personality achieved through different behaviors triggered by a variety of stimuli. Originally intended to
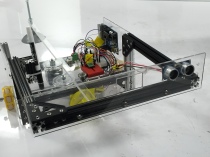
Autonomous Robot Part 3 – Marco Robo
Marco Robo Team members: Ruben Markowitz, Bryan Gardiner, Sara Johnson Roles: Bryan Gardiner(Integrator and Scribe), Sara Johnson(Integrator and Designer), Ruben Markowitz(Designer and Tutor) Introduction Marco Robo is a robot that explores its surroundings and creates a visual and physical map that
Autonomous Robot Part 3 – Marco Robo
Marco Robo Team members: Ruben Markowitz, Bryan Gardiner, Sara Johnson Roles: Bryan Gardiner(Integrator and Scribe), Sara Johnson(Integrator and Designer), Ruben Markowitz(Designer and Tutor) Introduction Marco Robo is a robot that explores its surroundings and creates a visual and physical map that