Team: Yu Jiang & Max Kornyev
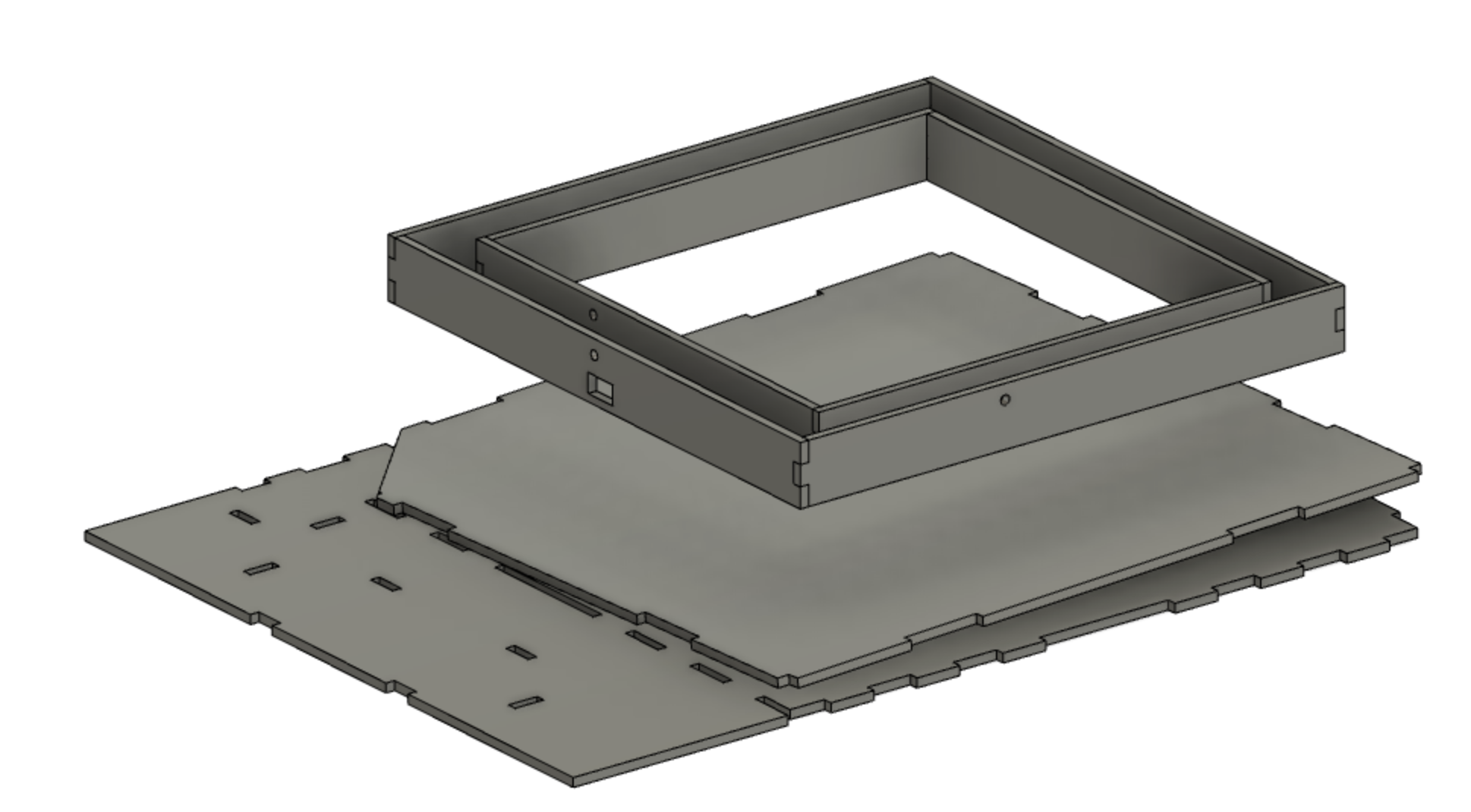
Maze Frame 3D Design
We created a CAD rendering of our basic maze design, which will be ready to be laser cut and assembled next week. 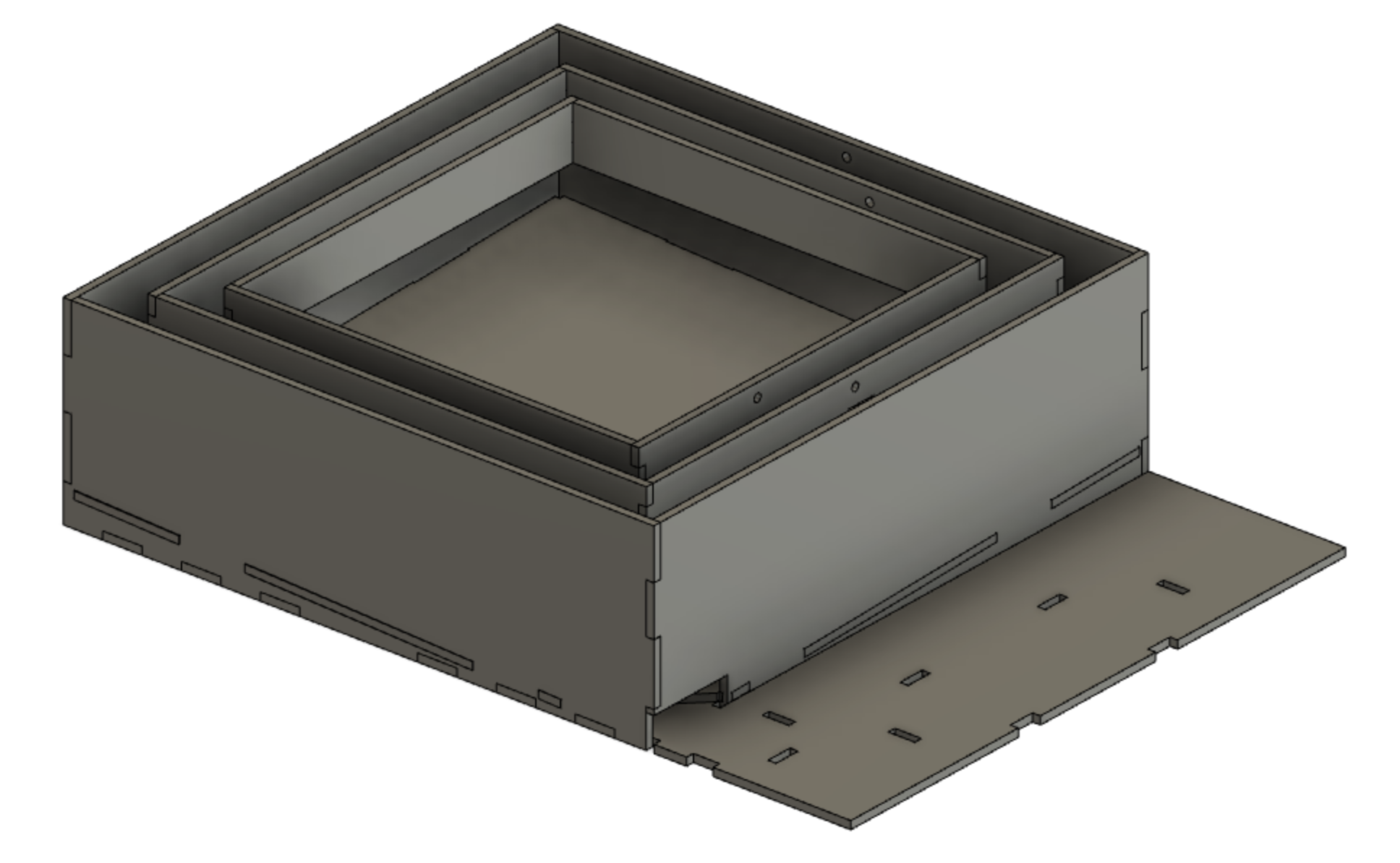
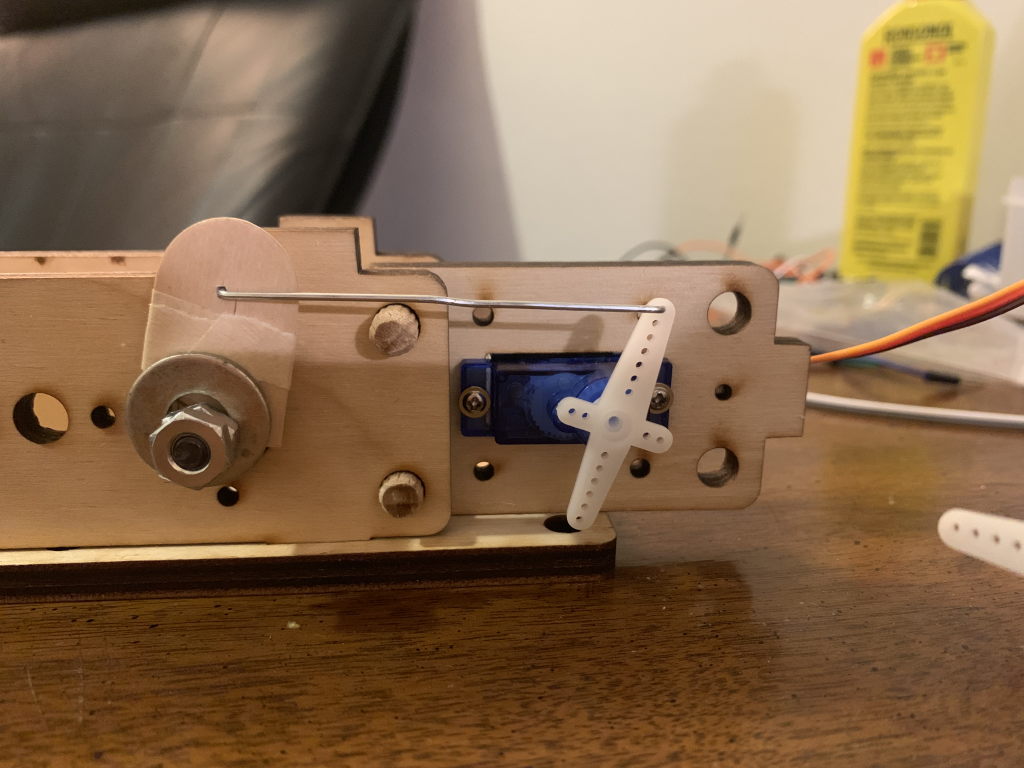
Handsfree Controller
We also refined our sensor input to create a responsive handsfree control of a 20 degree tilt on the two maze axes. We employ a simple filter to scale the value to our desired range, and implemented incremental movement of our servo mechanism.
The input is relatively faultless, but a low pass filter could also be implemented to avoid the occasional erroneous reading.
Code Artifacts
#include <Servo.h>
bool DEBUG = true; // Print output
// CONSTANTS
const int X_SERVO_PIN = 6;
const int Y_SERVO_PIN = 7;
const int L_ECHO_PIN = 13;
const int L_TRIGGER_PIN = 12;
const int R_ECHO_PIN = 11;
const int R_TRIGGER_PIN = 10;
// Change the following as needed
const int MAX_ANGLE = 20; // Max angle that the servo will rotate in either direction
const int START_ANGLE = 15; // Starting angle for a servo
const int MAX_DISTANCE = 30; // cm
const int MIN_DISTANCE = 0;
// GLOBALS
Servo xServo;
Servo yServo;
float leftDistance; // Hand distance in cm
float rightDistance;
int lAngle; // Corresponding servo angle
int rAngle;
void setup()
{
Serial.begin(9600);
xServo.attach(X_SERVO_PIN);
yServo.attach(Y_SERVO_PIN);
pinMode(X_SERVO_PIN, OUTPUT);
pinMode(Y_SERVO_PIN, OUTPUT);
xServo.write(START_ANGLE);
yServo.write(START_ANGLE);
}
void loop()
{
// Get hardware input
leftDistance = 0.01723 * handDistance(L_TRIGGER_PIN, L_ECHO_PIN);
lAngle = map(leftDistance, 0, MAX_DISTANCE, -MAX_ANGLE, MAX_ANGLE);
rightDistance = 0.01723 * handDistance(R_TRIGGER_PIN, R_ECHO_PIN);
rAngle = map(rightDistance, 0, MAX_DISTANCE, -MAX_ANGLE, MAX_ANGLE);
// Sanitize input
sanitizeAngles();
if (DEBUG) {
Serial.print("L: ");
Serial.print(leftDistance);
Serial.print(" --> ");
Serial.println(lAngle);
Serial.print("R: ");
Serial.print(rightDistance);
Serial.print(" --> ");
Serial.println(rAngle);
}
// Smooth motion
moveServo(yServo, START_ANGLE + lAngle); // L
moveServo(xServo, START_ANGLE + rAngle); // R
// Naive Motion
//yServo.write(START_ANGLE + lAngle); // L
//xServo.write(START_ANGLE + rAngle); // R
delay(100);
}
long handDistance(int TRIGGER_PIN, int ECHO_PIN)
{
pinMode(TRIGGER_PIN, OUTPUT);
digitalWrite(TRIGGER_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
pinMode(ECHO_PIN, INPUT);
return pulseIn(ECHO_PIN, HIGH);
}
// Prepares the input for parsing
void sanitizeAngles() {
if (lAngle > MAX_ANGLE) { // Left
lAngle = MAX_ANGLE;
}
if (lAngle < -MAX_ANGLE) {
lAngle = -MAX_ANGLE;
}
if (rAngle > MAX_ANGLE) { // Right
rAngle = MAX_ANGLE;
}
if (rAngle < -MAX_ANGLE) {
rAngle = -MAX_ANGLE;
}
}
// Smooth/incremented servo movement
void moveServo(Servo &s, int angle) { // pass servo by reference
int previousAngle = s.read();
if (angle > previousAngle)
{
for (int i = previousAngle; i <= angle; i++)
{
s.write(i);
delay(10);
}
}
if (angle < previousAngle)
{
for (int i = previousAngle; i >= angle; i--)
{
s.write(i);
delay(10);
}
}
}
Leave a Reply
You must be logged in to post a comment.