Project Synopsis:
Our project explores the possibility of integrating a pneumatic system of parts to an existing framework of toys, in this case: Legos. This new system, presents the potential to teach those who may be unfamiliar with soft robotics with a lower barrier of entry to the field. The compatibility of the soft pneumatic parts to a game system like Legos, gives the opportunity to build new knowledge off of an existing foundation. The pneumatic parts themselves explore different silicone air chamber configurations, which can present an assortment of bending paths, thus teaching something about air flow and how rate of airflow changes the created form. Our users are those unfamiliar with the field of soft robotics and has the desire to create with Legos.
Experiment Steps:
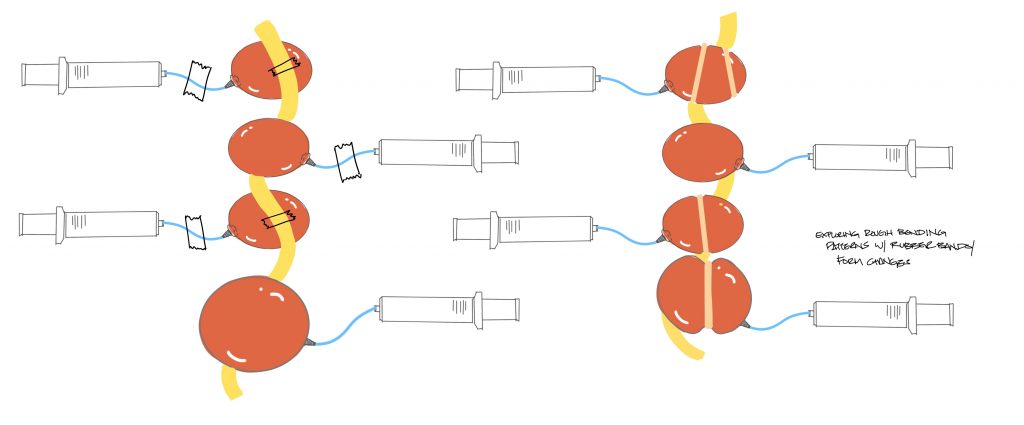
Our experiment remains roughly the same as last class. We plan on utilizing the materials given to us by Garth to explore what next steps we can take. As of right now, our experiment involves using a syringe, using a connector to connect to plastic tubing, and then using a plastic barbed fitting to connect a balloon. This is primarily to test the connection and the ability to pass air effectively through the parts. From there we can then test whether the barbed fitting can serve as a driving constraint for future silicone/inflatable explorations. After inflation, we also plan to look into how we can utilize the inflation/deflation to create some interesting forms with the balloons or some other inflatable material.
Bill of Materials:
| Item | Quantity | Price | Link |
| 100 mL syringe | 1x | $4.34 | https://www.mcmaster.com/7510A807/ |
| Luer lock connector | 1x (10pk) | $4.36 | https://www.mcmaster.com/51525K215/ |
| PVC plastic tubing | 2ft | $0.48 | https://www.mcmaster.com/5233K53/ |
| Barbed fitting | 1x (10pk) | $10.58 | https://www.mcmaster.com/5463K152-2974K263/ |
| Balloons | 2x | $0 | Elena’s home |
Relevant Technical Papers:
We found a literature review focusing specifically on modular soft robotics (1). A section of the paper surveys different approaches to connecting modular soft actuators, and we think this section will be valuable as we do our research. It outlines different forms of connections, notably a wide range of both soft and rigid mechanical connections, capable of holding actuated parts together while letting air or another fluid pass through without escaping.
Of these connectors presented, the bistable connector, which consists of a lip that flips inside-out when engaged with a rigid connector, seems particularly promising and possible to implement. This might be a strong contender for a mechanism to experiment with once this first experiment is completed and we can move on to more custom components for the soft actuators.

Works Cited:
1. Chao Zhang, Pingan Zhu, Yangqiao Lin, Zhongdong Jiao, Jun Zou. “Modular Soft Robotics: Modular Units, Connection Mechanisms, and Applications.” Advanced Intelligent Systems, Volume 2, Issue 6, page 1900166. 2020. doi: 10.1002/aisy.201900166.