Project Objectives:
To imitate a living organism that reacts to human touch/proximity by way of group movement. The organism reactions should feel organic and unpredictable, engaging the audience.
Reflection on the Creative Design Opportunities:
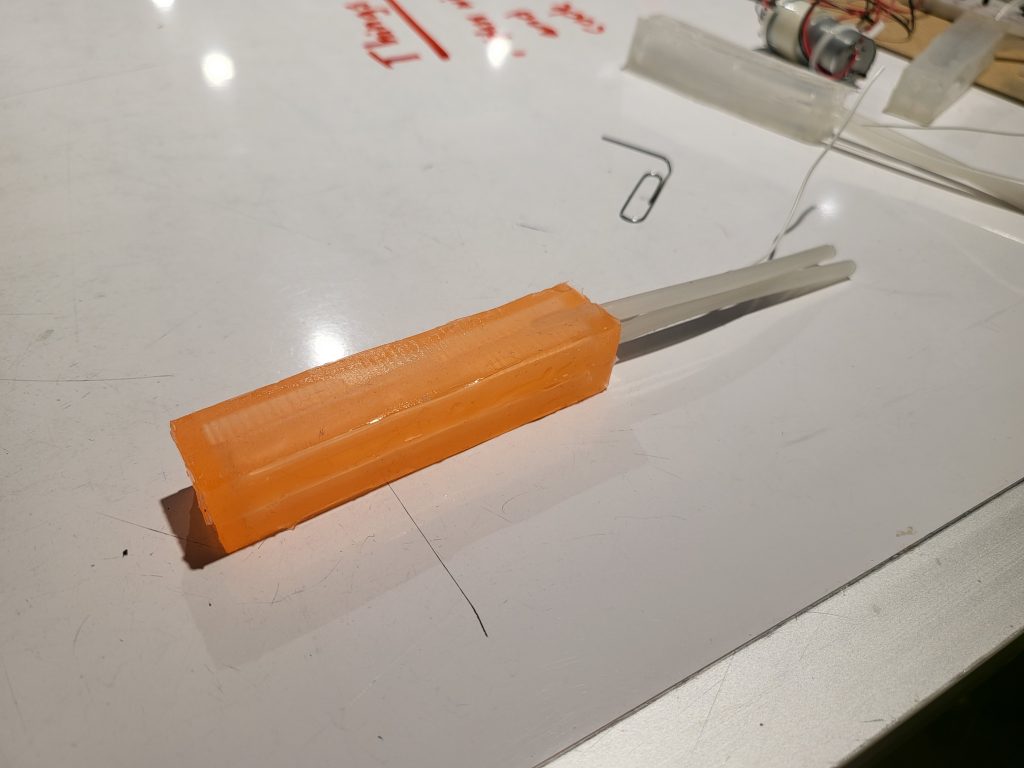
We embraced the use of silicon, pneumatic actuation, and capacitive touch sensing to create a feeling of movement and mysticism in the piece. The silicon paired particularly well with the capacitive touch sensing while embedding the necessary wires into the individual silicon tentacles. Then our inflation technique, while simple, was effective in creating the desired movement.
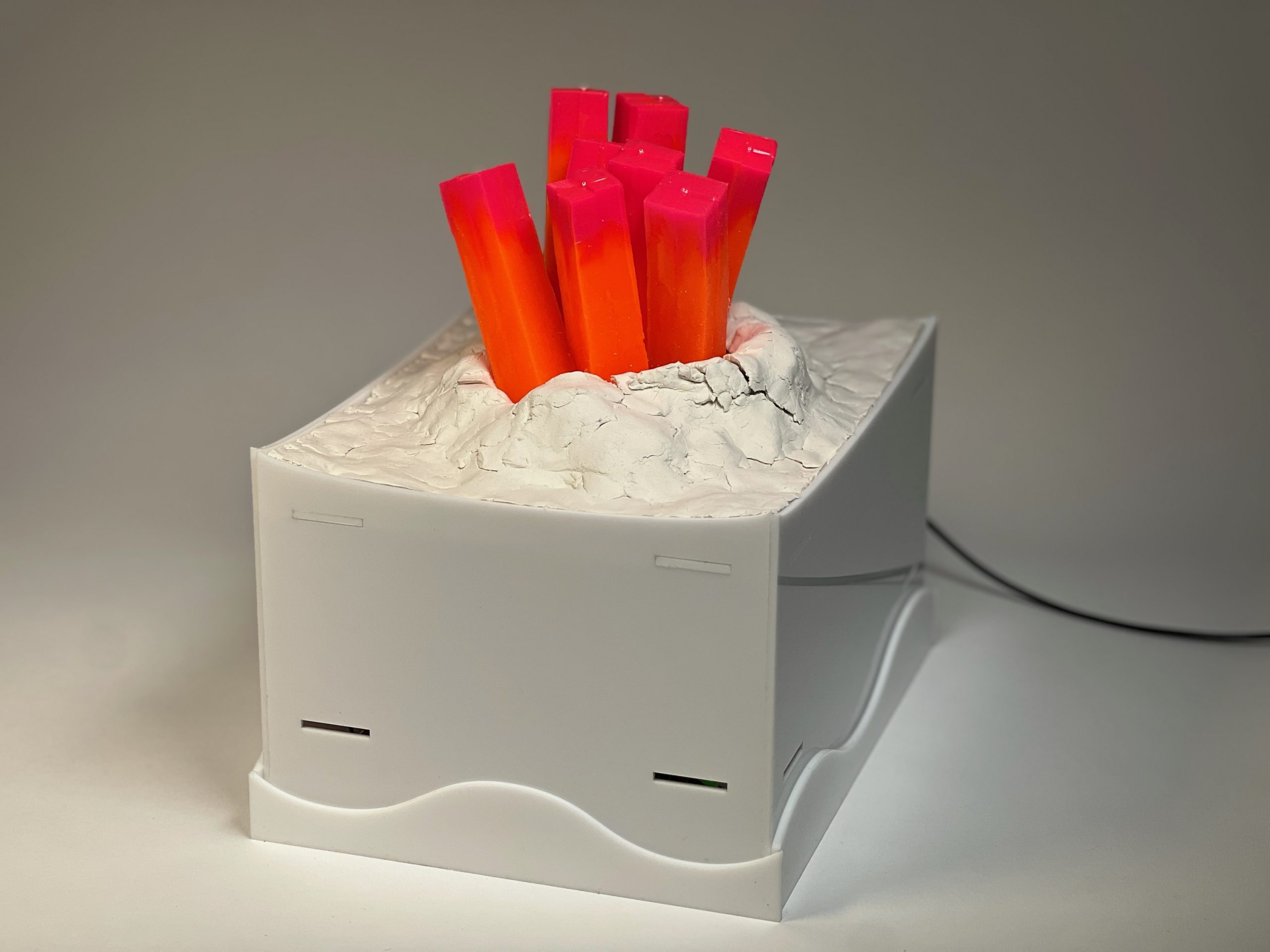
Unfortunately due to 3D printer problems, the shape of the individual tentacles was quite blocky as opposed to our ideal, more rounded shape. However, we were able to effectively counteract this inorganic feeling through our use of color and environment staging. The 1-to-2 pink to orange gradient in fluorescent colors mimicked real sea anemone in a very productive way. Additionally, the off-white clay placed around the base of the anemone brought a natural texture to the surroundings.
Outcomes:
We are quite pleased with how our piece turned out. Our audience was surprised and delighted by the interactions with anemone. The color was especially well received as people had not seen silicon cast as a gradient before. They were particularly excited by one of the tentacles that had a lot of movement. The box also worked well by creating a “blank” display space, while also, of course, hiding all of our extra wires. The natural environmental quality was also not lost due to the space at the top of the box being made into a rough terrain. Serendipitously, the motors’ noises played a fun part in the final exhibition, with some audience members asking if the sounds were intentionally included.
The motors, however, did initially pose a challenge to us. They could not vacuum air out as advertised, so we had to find a work-around to still drain air out of the tentacles. In the end, we poked holes in the tubing itself to create intentional air leaks. This worked very well, the deflation process appeared very natural.
Another large issue for us was the defunct 3D printers, limiting what our shapes could be to our first iteration mold. However, as mentioned above, that seemed to also work out. A notable comment by an audience member was that they liked the shape because it felt more “crystalline”, amplifying the surprise and mysticism when the anemone would start to inflate.
Citations
K. Suzumori, S. Iikura and H. Tanaka, “Development of flexible microactuator and its applications to robotic mechanisms,” Proceedings. 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 1991, pp. 1622-1627 vol.2, doi: 10.1109/ROBOT.1991.131850.
Qi Wang, Zhenhua Wu, Jianyu Huang, Zhuolin Du, Yamei Yue, Dezhi Chen, Dong Li, Bin Su. Integration of sensing and shape-deforming capabilities for a bioinspired soft robot. In Composites Part B: Engineering, Volume 223, 15 October 2021, doi: 10.1016/j.compositesb.2021.109116.
T. Wang, Y. Zhang, Z. Zhu and S. Zhu, “An Electrohydraulic Control Device With Decoupling Effect for Three-Chamber Soft Actuators,” in IEEE/ASME Transactions on Mechatronics, vol. 27, no. 3, pp. 1683-1691, June 2022, doi: 10.1109/TMECH.2021.3087196.
Technical Documentation
Code:
CAD Files
Photographs




Contributions
Elise:
Silicon Fabricator: Mixed the silicon and poured it into the mold to make our tentacles. Responsible for the silicon color gradient idea.
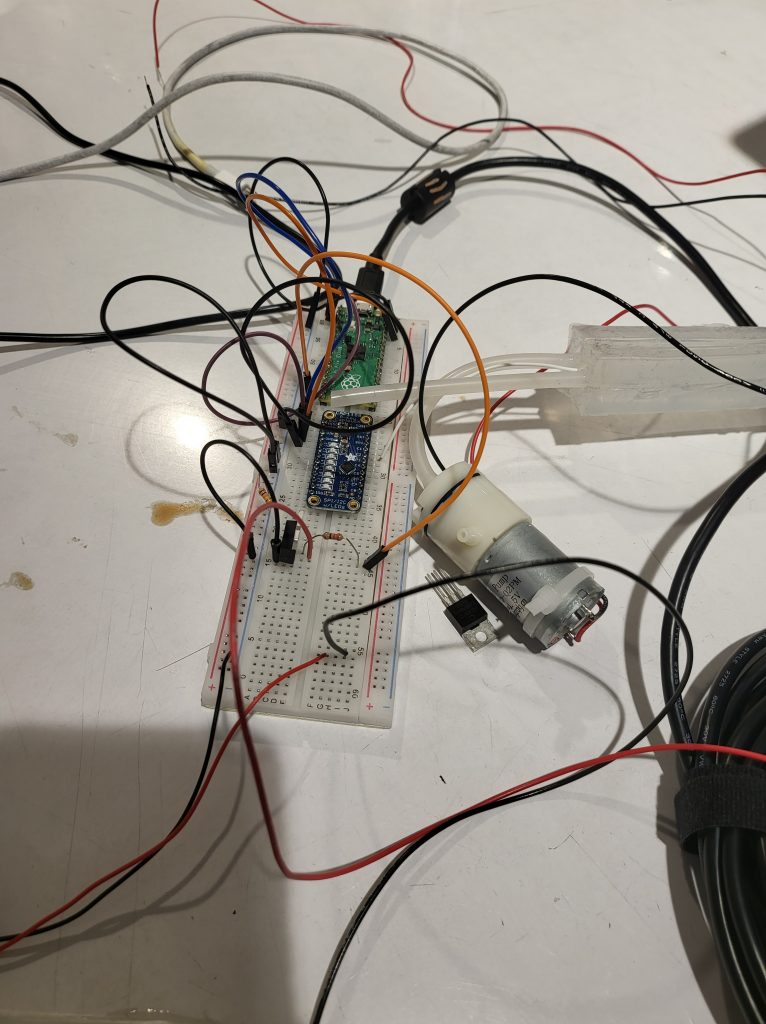
Circuit Board Engineer: Wired the Raspberry PI, MOSFETs, capacitor, pumps, etc.
Box Laser Cutter: Designed and laser cut the box. Filled the top with paper clay.
Leah:
Movement Choreographer: Designed the intended timing of each pump to produce movement in each tentacle, creating 6 different “dances” for the anemone to perform.
Programmer: Wrote the code that turns the pumps on and off and reads the capacitor input.
Pump Mechanic: Poked holes in each tentacle pipe to cause a controlled leak. Determined the number of holes after a series of tests. Connected and hooked up each tentacle to a specific pump.
Both:
Mold Designers: Worked together to design the mold. Figured out and decided on a two-chamber system early on in the project.
Assistants: Each assisted the other with their primary duties. Leah assisted Elise with fabricating tentacles and wiring the MOSFETs. Elise assisted Leah with debugging and hooking up pumps.
]]>Monday, 4.10:
- Message Daniel about the pump thing
- Tried more scenarios with the pumps, no success
- Lent out vacuum pump, did not work
- Tried a pinhole technique for draining air
- We have decided that this is the route that we will go for the rest of the project
- Started casting another tentacle, this time in orange
Wednesday, 4.12
- Sealed orange tentacle
- Made capacitive motor piano
- Reorganised breadboard to be more clean
- Updated the code
- Experimented more with holes in the tubing
- Four holes seems good, inflating the other side at the same time seems to deflate it at a nice rate
- Made a little dance
Monday, 4.17:
- Cast duotone tentacle
- Later: came back to bond the tentacle, as well as cast another duotone tentacle
- Worked on dances
Tuesday, 4.18:
- Continued work on casting and bonding
Monday, 4.3:
- Fully implemented slower speed, need to test more with t-junctions and multiple tentacles (will likely be slower when filling multiple)
- Worked towards air vacuum code + wiring
- Code still slightly faulty, wiring seems good
- Tried to print at techspark, didn’t
- Begun creating a second embedded-wire prototype using old mold
Tuesday, 4.4:
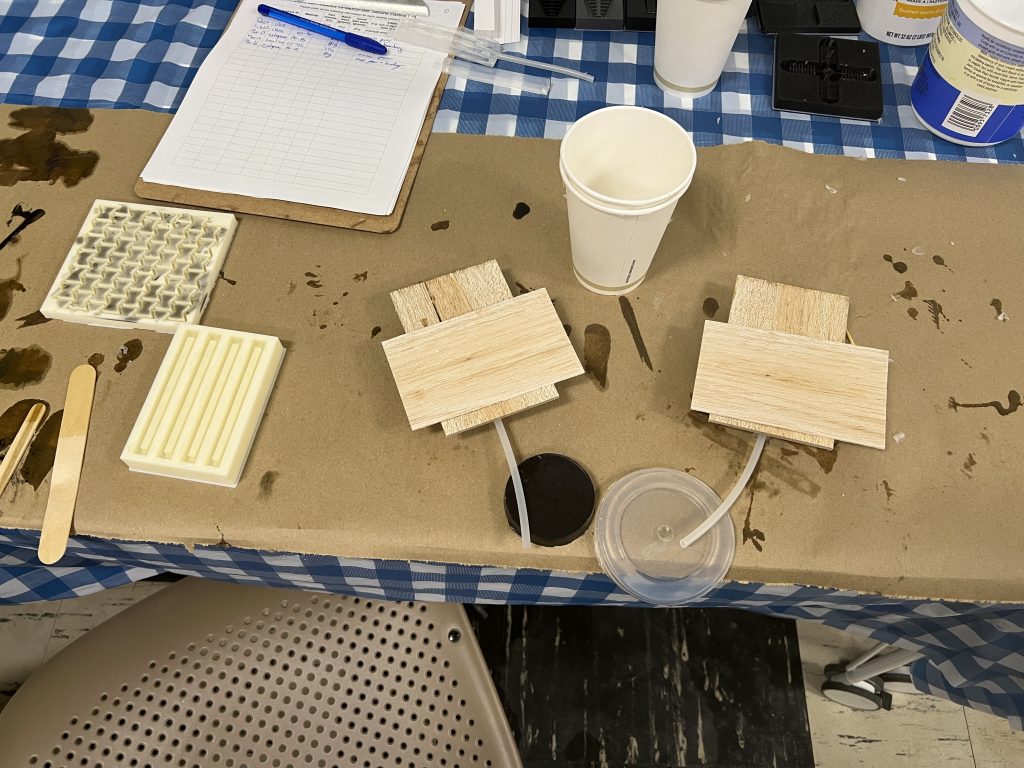
- Bonding round 1
- 4 hrs later bonding round 2
Wednesday, 4.5:
- Testing max tank (air fill) size
- Testing t-junction
- T-junction creates some air-tight issues with the motors, not sure what
- Note: new prototype has lower sensitivity than old prototype, not sure why…
Sunday, 4.9:
- Played around more with the motors and sealing, still not sure how to address the airflow issue with the motors
tested our first version of our silicon anemone and we made progress on programming and circuiting the electronics. We originally planned to print our newest version of the mold, but since the 3D printers were down, we had to postpone our plans.
Monday, 3.27:
- Concerns to address:
- Having trouble with the mosfets still
- How to extract air out?
- Print in ideate? Attempt to print at techspark? Laser cut……?
- Fought with MOSFET, won (thanks, Garth!)
Wednesday, 3.29:
- Combined code for MOSFET and capacitive touch
- Good results
- New raw threshold: 10
Sunday, 4.2:
- Started to add in new code from Garth to slow down the inflation rate
- Need the t-brackets (t-joints? t-splits?) to proceed forward with the prototype
- Moving forward next week:
- Get t-things
- Code deflation
- Code “cap” to inflation
- Cast another tentacle (hopefully with the new mold)
- Maybe, MAYBE start working on dual reactivity
Monday, 3.13:
- Retrieve printed mold, cast new silicon
- Later: cast failed :(, cast more silicon (Only casted 2, unsure if casting will fail again)
- Created semester schedule
- Discussed new mold design
Wednesday, 3.15:
- Checked on mold again, success! (Need to cast more, due to undercasting under testing purposes)
- Cast more silicon, fused one side of chamber
- Started on new mold design
- Experimented with capacitive touch sensor
Thursday, 3.16:
- Sealing success
- Mold success again!
- Fused some more chambers
- Cast a few more quarters
- Continued experimentation with capacitive touch sensor
Moving Forward:
- Test more refined code with capacitive touch sensor
- Print and cast new mold
- Experiment with air pumps in the prototype
Project Proposal
A sea anemone style of creature, responsive to human touch.
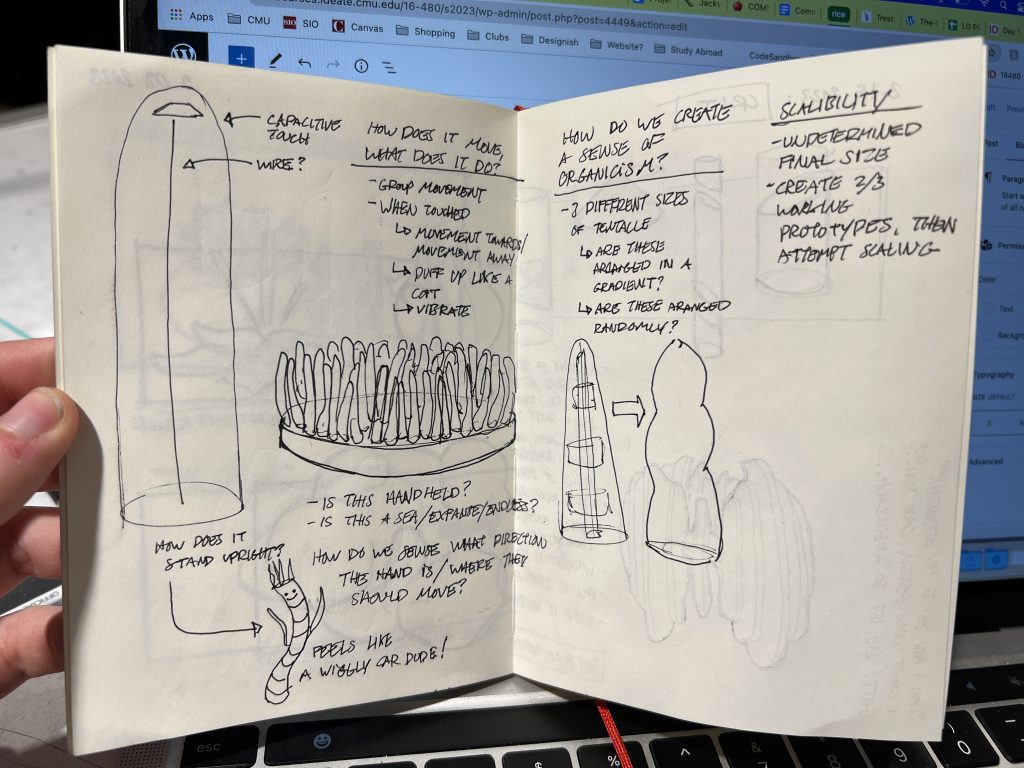
Sketches + Rough Prototypes
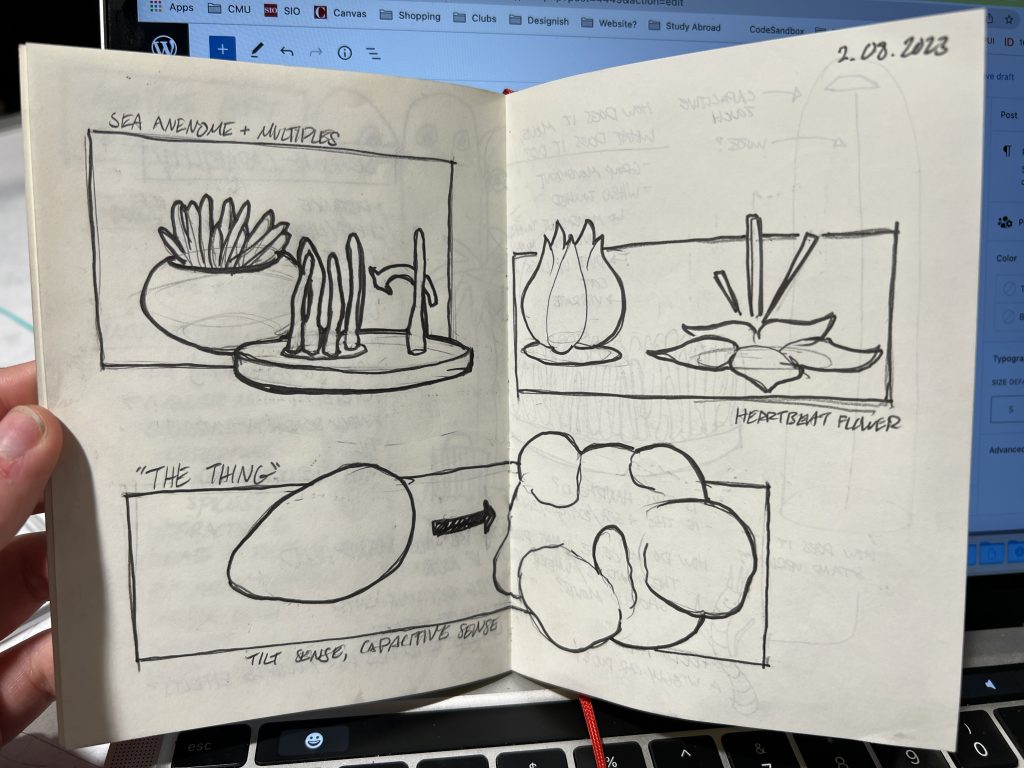
Sense of Movement
If possible, we would like to actuate the celiaci to move towards the user’s touch/hand, but we understand that that is difficult and potentially out of scope. Otherwise, we plan to inflate the celiaci and make them vibrate in response to the touch/hand.
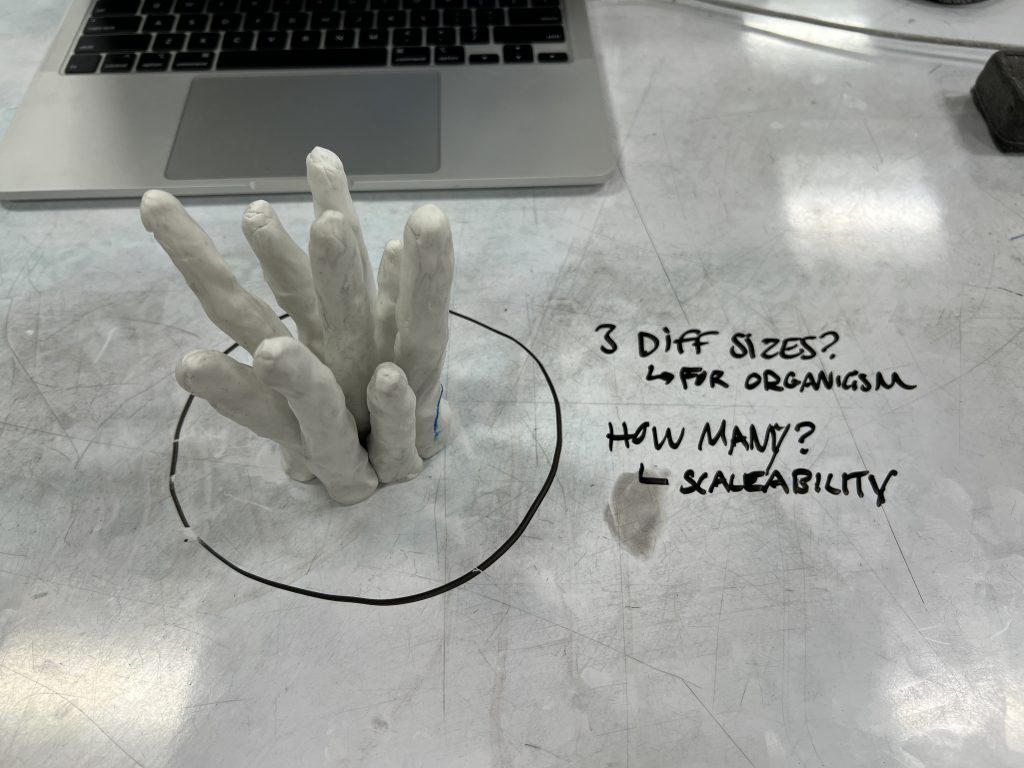
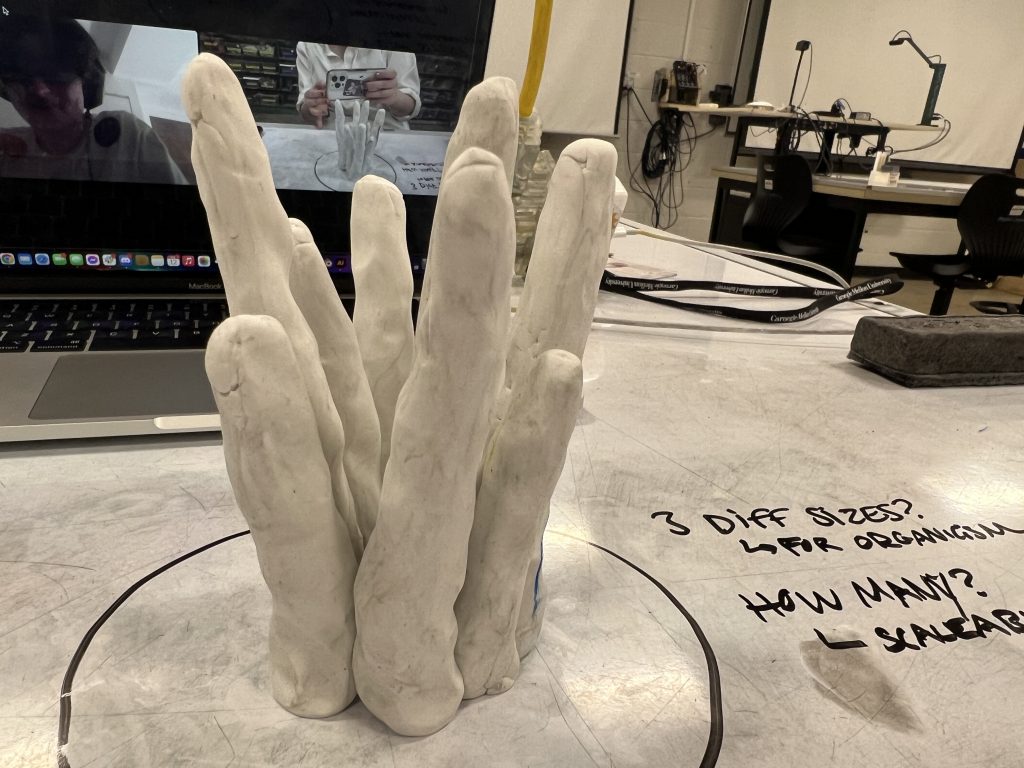
Scalability Plans
We intend to make a single working piece, then produce two or three other working prototypes to check group reaction. From there, we will produce as many more as we can.
First Experiment Plans
Work on creating a mold with several chambers to facilitate multi-directional movement.
Related papers:
K. Suzumori, S. Iikura and H. Tanaka, “Development of flexible microactuator and its applications to robotic mechanisms,” Proceedings. 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 1991, pp. 1622-1627 vol.2, doi: 10.1109/ROBOT.1991.131850.
T. Wang, Y. Zhang, Z. Zhu and S. Zhu, “An Electrohydraulic Control Device With Decoupling Effect for Three-Chamber Soft Actuators,” in IEEE/ASME Transactions on Mechatronics, vol. 27, no. 3, pp. 1683-1691, June 2022, doi: 10.1109/TMECH.2021.3087196.
Extra Notes
Will use colored pigment. Will use glow in the dark pigment.
]]>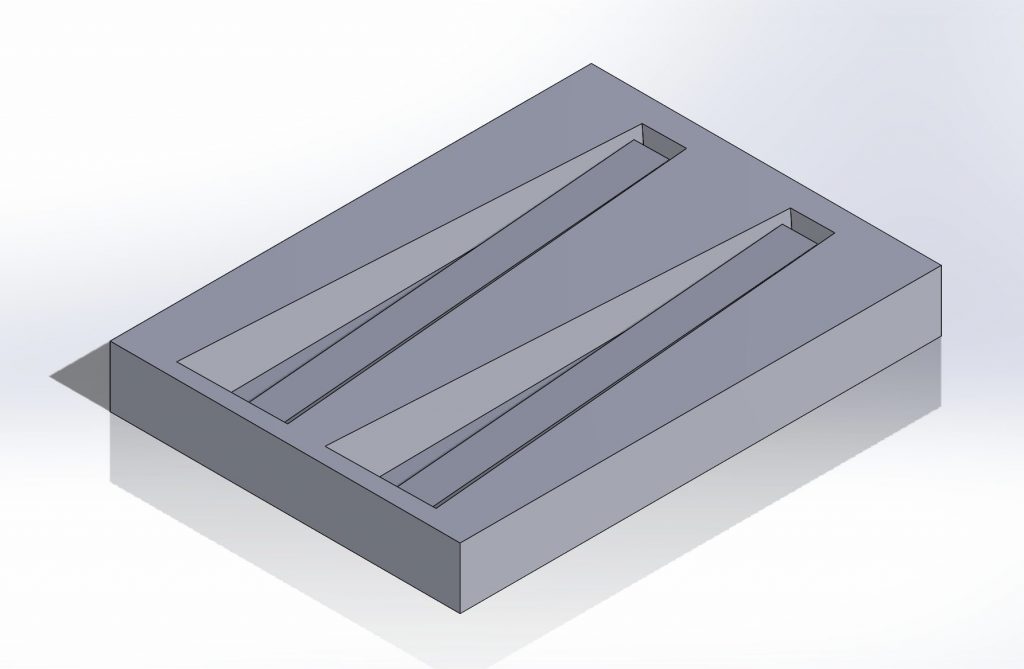
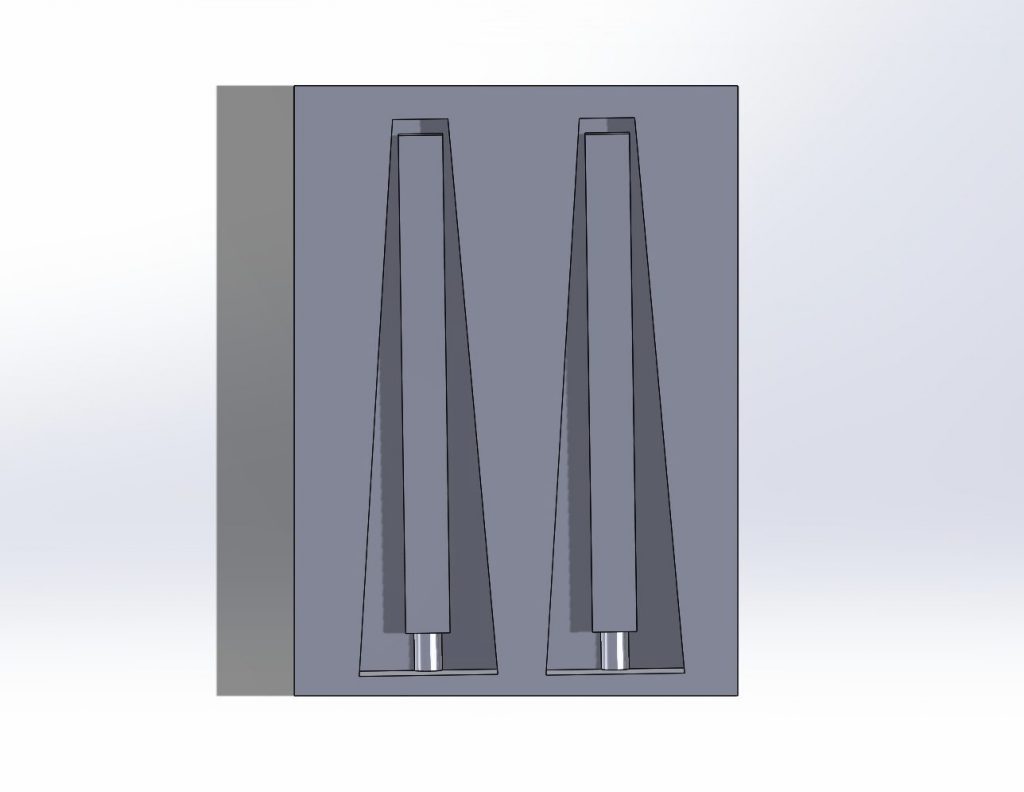
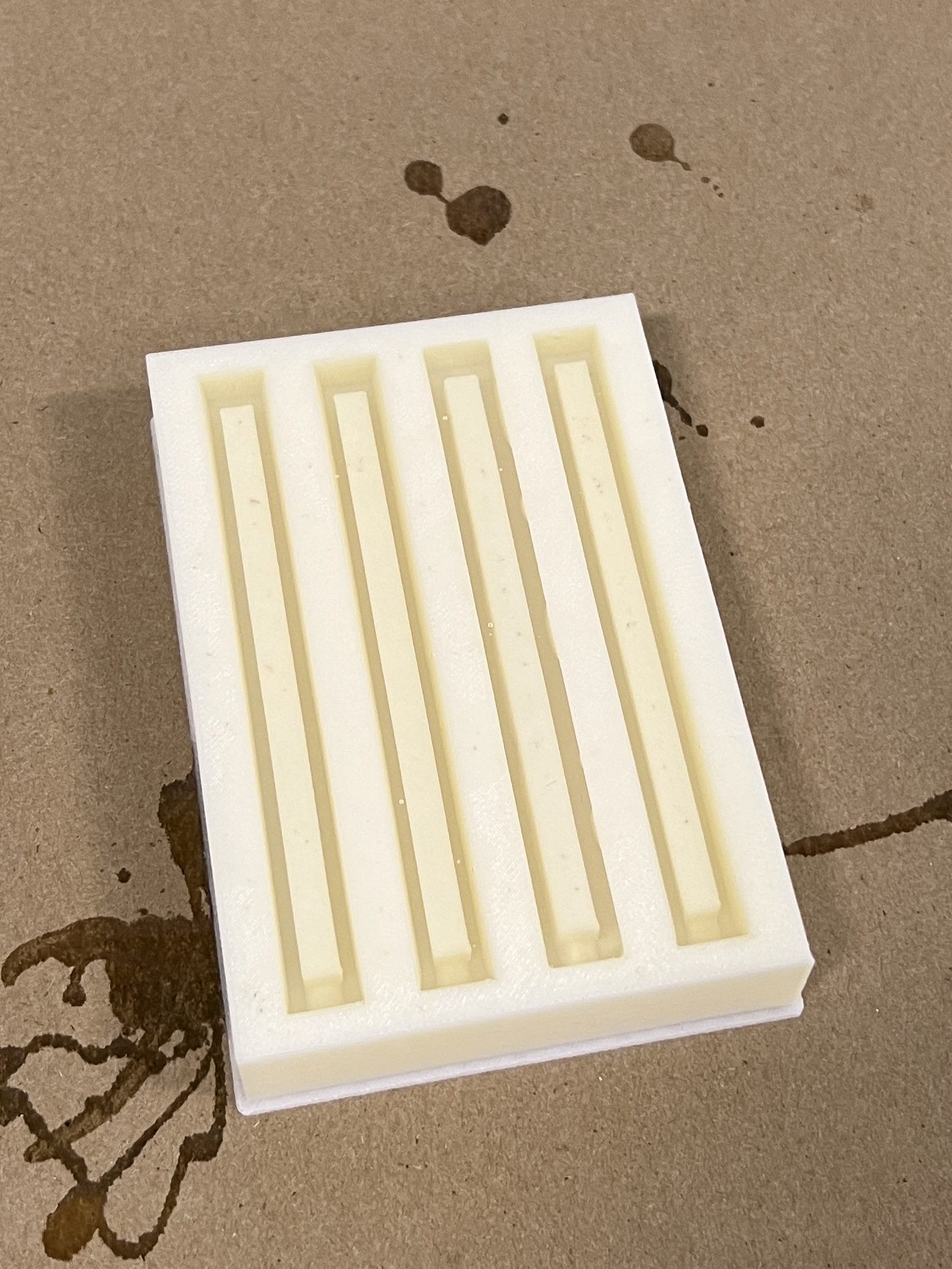
My inspiration for this mold is a single piece of a sea anemone. My original goal for this mold was to create a cylindrical shape with a rounded top, but upon reflection, I realized that I needed a flat side to my mold, otherwise it would not cast properly. I had a few troubles when creating this on Solidworks, but it was great practice and I feel much more confident in creating a new mold during future iterations.
]]>
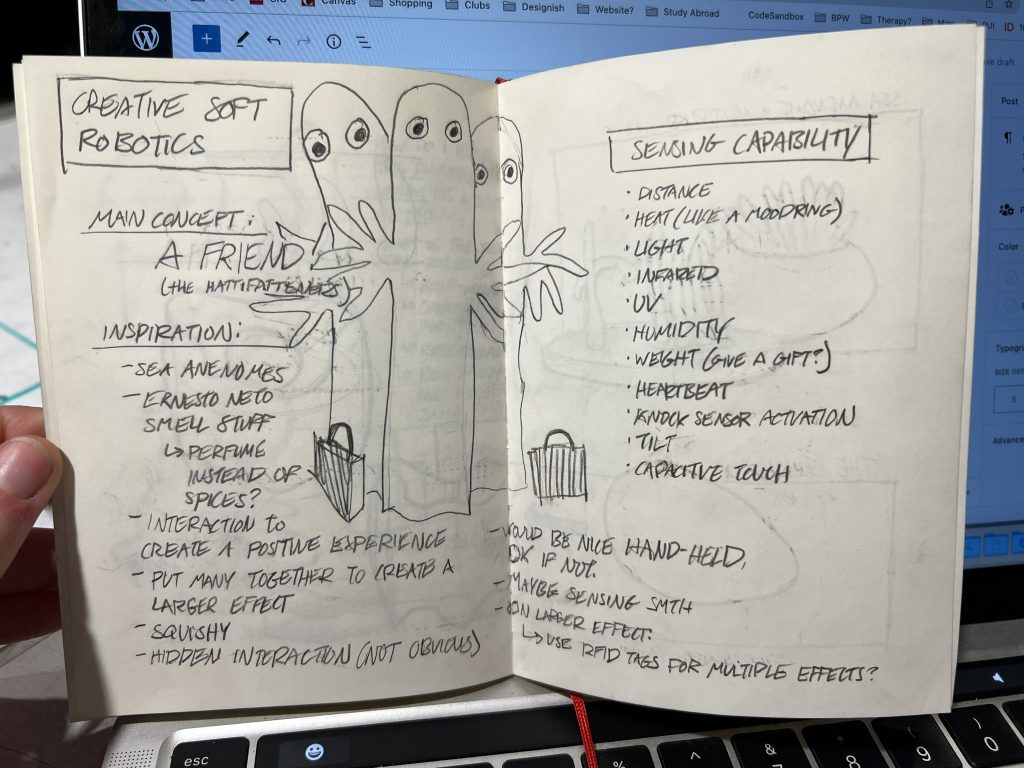
In this installation piece suspended from the ceiling, lycra netting sacs contain spices, including pepper, cumin, cloves, ginger and curcuma, creating shapes similar almost to stalactites. These aromatic sacs combined with the soft material nature of the lycra invites the viewer to become participants and to touch the sacs. The spices are meant to conjure feelings of nostalgia and memories, creating a far more tangible experience than what might be gathered from simply looking at the abstract installation. As Neto says himself, in relation to his creative practice, “an art that unites, helping us interact with others, showing us the limits, not as barriers but as a place of sensations and of exchange and continuity.”
https://www.macroasilo.it/mostra/ernesto-neto-mentre-niente-accade-while-nothing-happens, https://www.artnexus.com/en/magazines/article-magazine artnexus/5d63427290cc21cf7c0a1de5/71/ernesto-neto
Applying to Soft Technologies
I love the idea of trying to appeal to new senses, beyond sight and sound. So, in soft technology, I would think about trying to apply something like smell, which Neto utilizes as a part of While Nothing Happens, to some form of actuation to communicate to the viewer that something has changed, or something is about to change. Could a soft technology blow spices at a person? Could the viewer select their spices? Could the machine select the viewer’s spices based on another selection? Would it do that in response to something seemly unrelated that a viewer does? How does spice travel through silicon? Does the sensed capacity be something that we (humans) sense at all?
Papers that explore soft robotic interaction with the user
- Alessandro Ubaldi, Mirko Gelsomini, Marzia Degiorgi, Giulia Leonardi, Simone Penati, Noëlie Ramuzat, Jacopo Silvestri, and Franca Garzotto. Puffy, a Friendly Inflatable Social Robot. In Extended Abstracts of the 2018 CHI Conference on Human Factors in Computing Systems, CHI EA ’18, 1. New York, NY, USA, April 2018. Association for Computing Machinery. doi:10.1145/3170427.3186595.
- Qi Wang, Zhenhua Wu, Jianyu Huang, Zhuolin Du, Yamei Yue, Dezhi Chen, Dong Li, Bin Su. Integration of sensing and shape-deforming capabilities for a bioinspired soft robot. In Composites Part B: Engineering, Volume 223, 15 October 2021. https://doi.org/10.1016/j.compositesb.2021.109116.
- Hongman Wang, Zhisen Zhu, He Jin, Rui Wei, Lei Bi, Wenling Zhang. Magnetic soft robots: Design, actuation, and function. In Journal of Alloys and Compounds, Volume 922, 20 November 2022. https://doi.org/10.1016/j.jallcom.2022.166219.
While I was unable to find any papers that tied smell and soft robotics, I enjoyed how much life was breathed into each of the robots in these papers. In class, we talked about how to create empathy for something intimate, and these papers showcased excellent examples of that. Particularly in the second paper with the anemone, by way of using two different kinds of actuation, is able to add a very organic feel of movement. I think that the closer a robot can achieve to organic motion, the more empathy and connection the viewer will feel towards the robot.
]]>https://domaine-chaumont.fr/en/centre-arts-and-nature/archives/2013-art-season/klaus-pinter
Makes very large scale, inflated installations, however they are not kinetic. They’re interesting for their size and shape, and personally I find them intriguing for their potential transference into movement.
Adaptive Pneumatic Shelters, Hani Fallaha
http://www.achimmenges.net/?p=4401
These pneumatic shelters are more of an architecture piece than sculpture, but similar to Klaus Pinter’s work in that their size makes them intriguing. I am particularly drawn to them for their different potential inflated positions, which resembles breathing.
Jewelry, Katharina Vones
I enjoy the colors and shapes that are in this jewelry! The contrast between the silicon and the wire is beautiful and I can see how something similar might be used in a soft robotic sculpture piece.
Aeromorph Inflatables, MIT Media Lab’s Tangible Media Group
I thought it was interesting to see how different seams within the inflatable change how it actuates. Having taken the e-textiles micro, we briefly went over different types of soft actuation in textiles, and this reminded me of that. I also thought it was interesting to see paper (or something like paper) being used. It’s definitely more uncommon to see in a kinetic/inflatable space.
]]>D. Zhou, Y. Fu, J. Deng, J. Sun and Y. Liu, “A Bistable Jumping Robot with Pure Soft Body Actuated by Twisted Artificial Muscle,” 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 2021, pp. 388-393, doi: 10.1109/M2VIP49856.2021.9665013.
Do you have any conflict of interest in reviewing this paper? A “conflict of interest” is defined as follows
- Ph.D. thesis advisor or advisee
- Postdoctoral advisor or advisee
- Collaborators or co-authors for the past 48 months
- Any other individual or institution with which the investigator has financial ties
I have no conflicts of interest with this paper.
Expertise. Provide your expertise in the topic area of this paper.
- 4 – Expert
- 3 – Knowledgeable
- 2 – Passing Knowledge
- 1 – No Knowledge
2 – Passing Knowledge
Summary. Please summarize what you believe are the paper’s main contributions to the field of soft robotics. Please write a short paragraph.
This paper takes on the challenge of achieving a fast jump in soft robotics with a purely soft body, compared to previous work that, in large, actuates jumping motions using a rigid spine. Jumping for soft robots is an inherently more difficult action due to the nature of the soft material acting against stored potential energy. If a repeatable and consistent jumping motion is achieved, the realm of possible movement for soft robots are significantly expanded.
Strengths and Weaknesses. What are the main strengths and weaknesses of this work? Does the paper have strengths in originality and novelty? Please write a short paragraph.
One of this paper’s strengths lies in its language and diagrams. The diction used is appropriate, yet still approachable for those less knowledgeable in the field. Similarly, the diagrams use digitally fabricated content alongside marked-up photography to create clear ties between written content and other diagrams. However, the paper somewhat lacks writing on related literature. Specifically in the introduction, five related papers are mentioned about jumping mechanisms in small and sometimes soft robots, but how that literature informs this paper is not expounded upon.
Soundness. Are the ideas, algorithms, results or studies technologically/methodologically sound? Please write a short paragraph arguing for the strengths and weaknesses of the work.
Yes, the paper seems sound. The Materials and Methods section was comprehensive, including detailed diagrams on fabrication, a thorough walkthrough of the mathematics behind the actuation, and overview of the control system. The Review and Results section was comprehensive as well, although I would have appreciated charts of the data to go with the graphs in that section as well as information on the amount of trials done.
Related Work. Does the paper adequately describe related and prior work? Please write a sentence or short paragraph.
This paper appropriately references relevant literature and related topics within soft robotics and jumping actuation. The references are not so thoroughly reviewed in the actual paper, but this could in part be due to the page limit as part of the conference guidelines.
Presentation. Is the paper well organized, well written and clearly presented? Please write a sentence or short paragraph.
Yes, this paper is well organized, clearly presented, and very well written.
Suggestions. Do you have suggestions for improving this paper? Please write several paragraphs detailing specific points of the paper which merit reconsideration. Be sure to address the text, figures and tables, mathematics, and grammar and spelling.
First, I would suggest this paper to go in more detail about related works if possible. Again, I realize that there is a page limit in line with the conference paper guidelines, but at several points in the Introduction up to nine references are mentioned in fell sweeps that provide next to no information about the reference. Looking into a couple of these reference sections, the references contained in these fast mentions can be quite varied and it feels inappropriate the group them in such large terms.
Additionally, I would recommend for this paper to add more information about its results data. In particular reference to Fig. 8, I appreciate that the graphs are there but I wish that there were more information on what exactly the data on those points were, perhaps in a chart format. Additionally, the lack of information of trials in unfortunate. I would like to know if the jumping actuation was repeatable and consistent at every temperature.
Comments to Committee (Hidden from authors). Does the paper have enough originality and importance to merit publication? Is the paper relevant to the field? These comments will NOT be sent to the authors: Please write one or more paragraphs as needed to justify your review judgement.
Yes, this paper has enough originality and importance to merit publication due to its success with actuating a purely soft body to jump. Particularly as the conference relates to Machine Vision in Practice, this paper provides a compelling fabrication and actuation method to further how soft robots may move in the future. Finally, the paper concludes with a note on the potential of controlled jump direction, which is fairly compelling.
Overall Rating. Provide your overall rating of the paper (5 is best).
- 5 – Definite accept: I would argue strongly for accepting this paper.
- 4 – Probably accept: I would argue for accepting this paper.
- 3 – Borderline: Overall I would not argue for accepting this paper.
- 2 – Probably reject: I would argue for rejecting this paper.
- 1 – Definite reject: I would argue strongly for rejecting this paper.
4 – Probably accept: I would argue for accepting this paper.
]]>